Multi-Sensor Framework for Real-Time 3D Reconstruction in Robotic Applications
DOI:
https://doi.org/10.64972/jaat.2025v3.238p42e:577-588Keywords:
Multi-Sensor Fusion, 3D Reconstruction, Robotic Applications, Real-Time Processing, Sensor Calibration, Environmental MappingAbstract
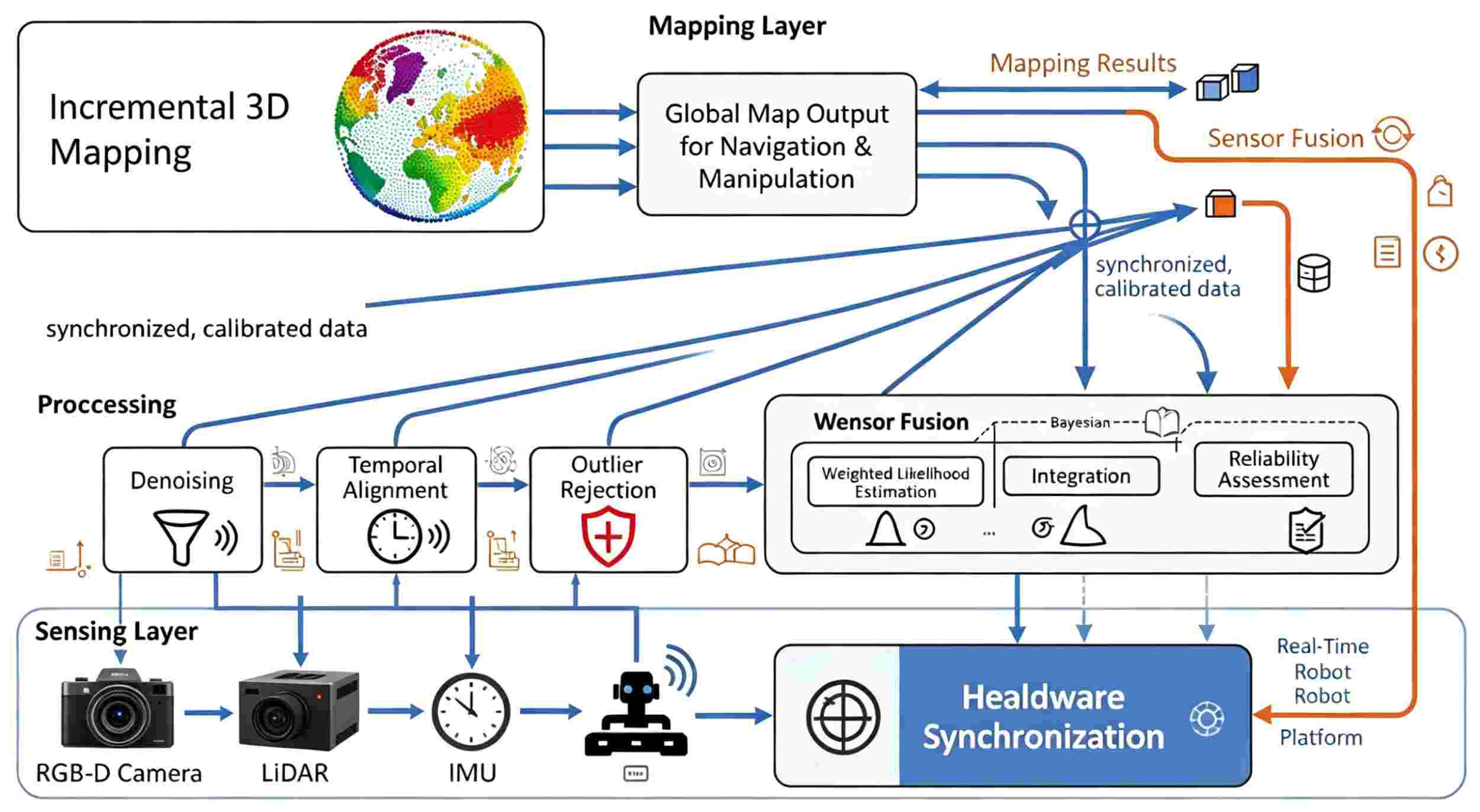
Due to its ability to accurately and stably construct 3D models in the field of robotics, multi-sensor fusion frameworks have recently garnered attention. This paper introduces a module that integrates IMU sensors, RGB-D cameras, and LiDAR through high-precision spatiotemporal calibration and probabilistic data fusion. In the presence of noise and motion, mapping accuracy is improved through the use of adaptive weighted sensor fusion, denoising, and temporal alignment. The experiment used custom collection sequences and public datasets, collecting a total of over 350,000 frames of images from various environments, such as dynamic industrial areas and structured laboratories. The results show that the proposed framework has an average reconstruction error of only 0.012 meters on the TUM dataset and achieves an accuracy of over 0.93 at input frame rates of up to 60Hz. Real-time performance: The embedded hardware processes 26 frames per second, with a stable processing delay not exceeding 100 milliseconds. Robustness evaluation shows stable performance; under higher environmental complexity, the robustness score is 0.96, while controlled noise tests show the median error increases from 0.015 to 0.032 meters. The system's success rate in robotic navigation and operation tasks exceeded traditional benchmarks, reaching 97%. It can be concluded that achieving a reliable combination strategy of 3D perception and environment mapping in complex environments is feasible and, in most cases, practical.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Wiktor Marcin Kujawa, Julia Janczakowa

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





