Dynamic Object Detection Optimization Based on LiDAR-Camera Sensor Fusion in Urban Environments
DOI:
https://doi.org/10.64972/jaat.2025v3.204p16e:203-217Keywords:
Sensor Fusion, Object Detection, Urban Perception, LiDAR-Camera Integration, Real-Time SystemsAbstract
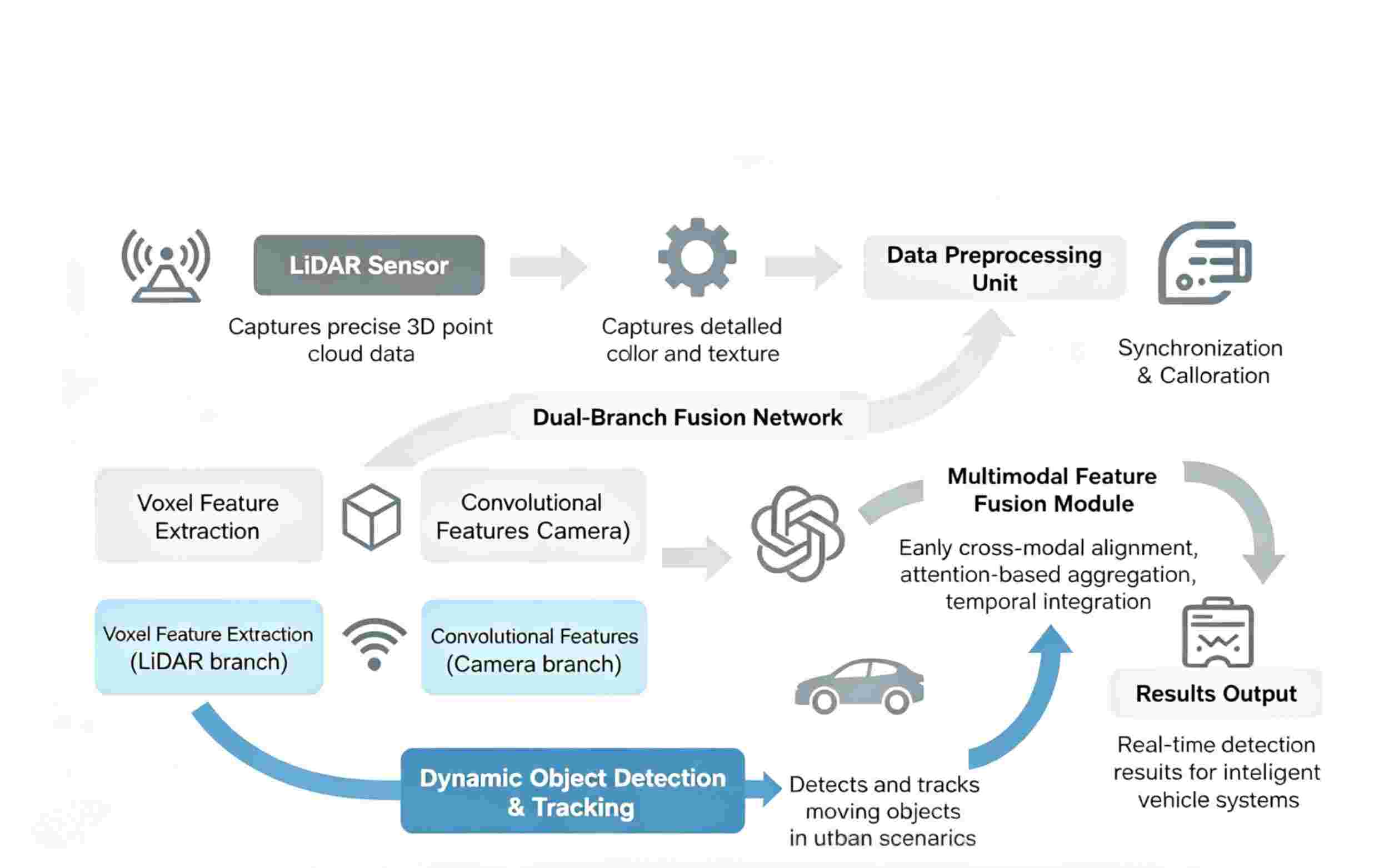
Due to a variety of lighting and weather conditions, as well as frequent object occlusion, the problem of object detection in a changing urban environment remains rather challenging. This research proposes an improved LiDAR-camera fusion architecture for robust multi-sensor recognition in order to overcome the aforementioned shortcomings. To guarantee precise spatial and temporal alignment of the point cloud and image data streams, a general pre-processing pipeline is suggested. Then, early cross-modal alignment, attention-driven feature aggregation, and temporal integration modules are implemented using a dual-branch fusion network architecture. Both self-collected and publicly accessible urban driving scene benchmark datasets were employed in the system evaluation. According to the aforementioned findings, the suggested approach has a mean average precision of 0.816 and a sequence-level F1-score of 0.871; in daylight, inclement weather, and at night, it performs better than LiDAR-only, camera-only, and conventional hybrid baselines. Tracking continuity under rapid scene changes and occlusions has been enhanced with a mean object trajectory localisation error of 12.4 pixels. The model will be applied in real time for intelligent vehicles and has consistently maintained an inference latency of less than 46 ms per frame. To put it briefly, the aforementioned techniques can handle the challenges of object recognition in dynamic contexts and offer great assistance for the creation of intelligent transport and urban mobility systems of the future.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Alicja Franciszka Kaczorowska

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





