Application of Deep Learning for Improving SLAM Algorithms in Autonomous Vehicles under Dynamic Scenarios
DOI:
https://doi.org/10.64972/jaat.2025v3.237p41e:561-576Keywords:
SLAM, Deep Learning, Semantic Segmentation, Multi-Modal Fusion, Autonomous VehiclesAbstract
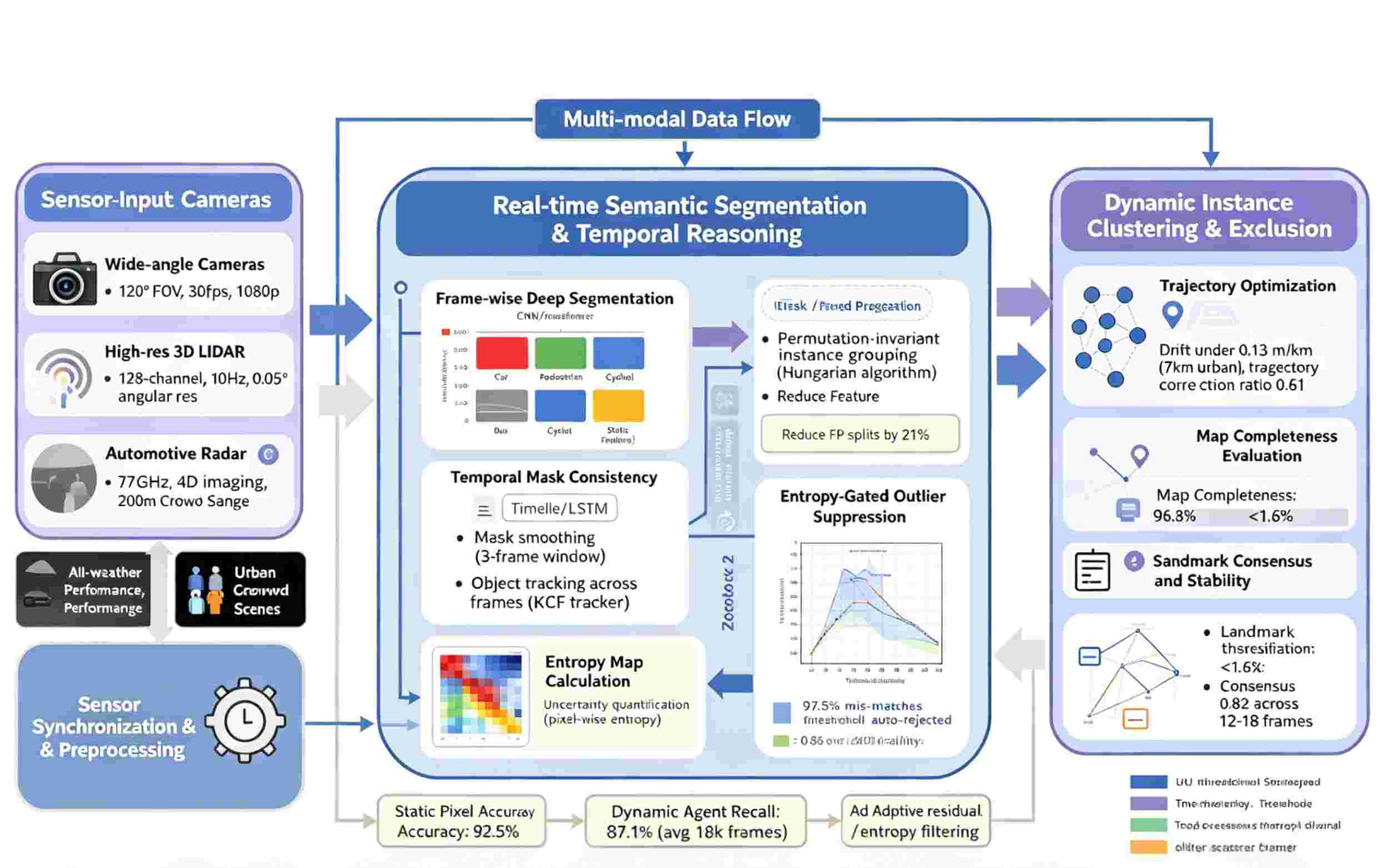
Although SLAM technology has not been tested in a variety of real-world scenarios, it is utilized in autonomous driving for the simultaneous building and localization of the map and position. In order to overcome the drawbacks of conventional SLAM pipelines, this study presents a dynamic-aware framework that makes use of deep learning-based multi-modal perception, real-time semantic segmentation, adaptive feature fusion, and entropy-informed backend optimization. Synchronous RGB cameras, high-density LiDAR and automobile radar, attention-driven semantic networks, and a sliding-window factor graph for joint state estimation are all integrated into the suggested design. The experiment was conducted on a production-level automotive computing platform using more than 150 kilometers of real automobiles' urban and suburban driving data. The system has achieved a sub-decimeter average trajectory error, decreased the mean Absolute Trajectory Error (ATE) to 7.2 cm, and surpassed a segmentation correctness index (SCI) of 0.90 for dynamic regions and 0.93 for static regions, according to the quantitative data mentioned above. Even with more than 30 moving agents each frame, the accuracy of the completeness map generation remains over 96 per century. It has also demonstrated consistent performance in the face of occlusion variations and heavy traffic. All modules are necessary for the system's overall accuracy and resilience, according to ablation and sensitivity analysis. In summary, the aforementioned approach has greatly improved the mapping and real-time vehicle localization in unrestricted urban landscapes and offered solid technical support for the deployment of intelligent vehicles in dynamic contexts.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Kamil Budzyński, Grzegorz Adrian Dziuba

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





