Interpretable Deep Learning Framework for Transparent Multi-Sensor Perception
DOI:
https://doi.org/10.64972/jaat.2025v3.218p30e:405-419Keywords:
Multi-Sensor Fusion, Explainable Artificial Intelligence, Robust Perception, Transparent SystemsAbstract
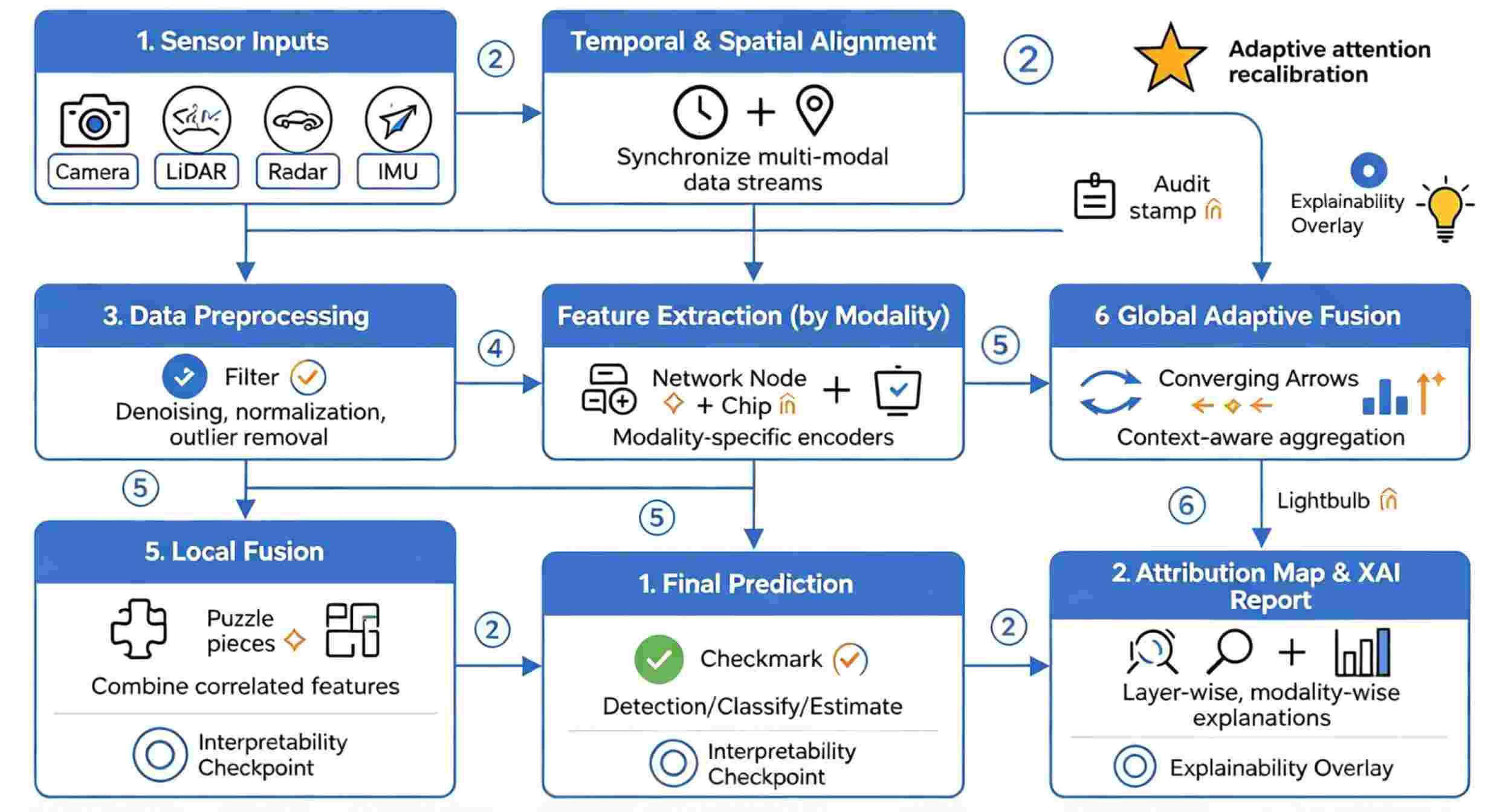
To operate in complex and dynamic environments, intelligent systems require multiple sensors. Traditional deep learning models are difficult to interpret, and therefore cannot meet the transparency requirements for audit trails in safety-critical applications. This study proposes a novel transparent deep learning framework for multi-sensor perception. To achieve high performance and interpretability, the framework adopts a modular fusion architecture and embeds interpretability modules. For the above tests, over 160,000 synchronized samples of heterogeneous sensor data were collected from urban driving and industrial inspection datasets. According to the experimental results, the proposed method achieved an accuracy of 96.4% and a macro F1-score of over 91% in the case of partial sensor failures. The method also improved accuracy by 4.1% compared to the classical fusion baseline and robustness by 5.8%. According to the interpretability consistency score, the system reduces attribution stability and cross-class misclassification by 23%. The results indicate that the framework can adaptively adjust the weights of different sensors and can also function normally under various adverse conditions. The explainable multi-sensor perception framework is expected to be used in high-safety fields such as medical diagnosis, autonomous driving, and industrial automation, enhancing the reliability and transparency of intelligent systems.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Joanna Truskolaska, Ewa Iga Niedźwiedź

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





