End-to-End Deep Reinforcement Learning Approach for Urban Autonomous Driving Path Planning
DOI:
https://doi.org/10.64972/jaat.2025v3.214p26e:348-361Keywords:
Deep Reinforcement Learning, Urban Autonomous Driving, Path Planning, Multimodal Sensor Fusion, Policy Robustness, Graph Neural Networks, Simulation EvaluationAbstract
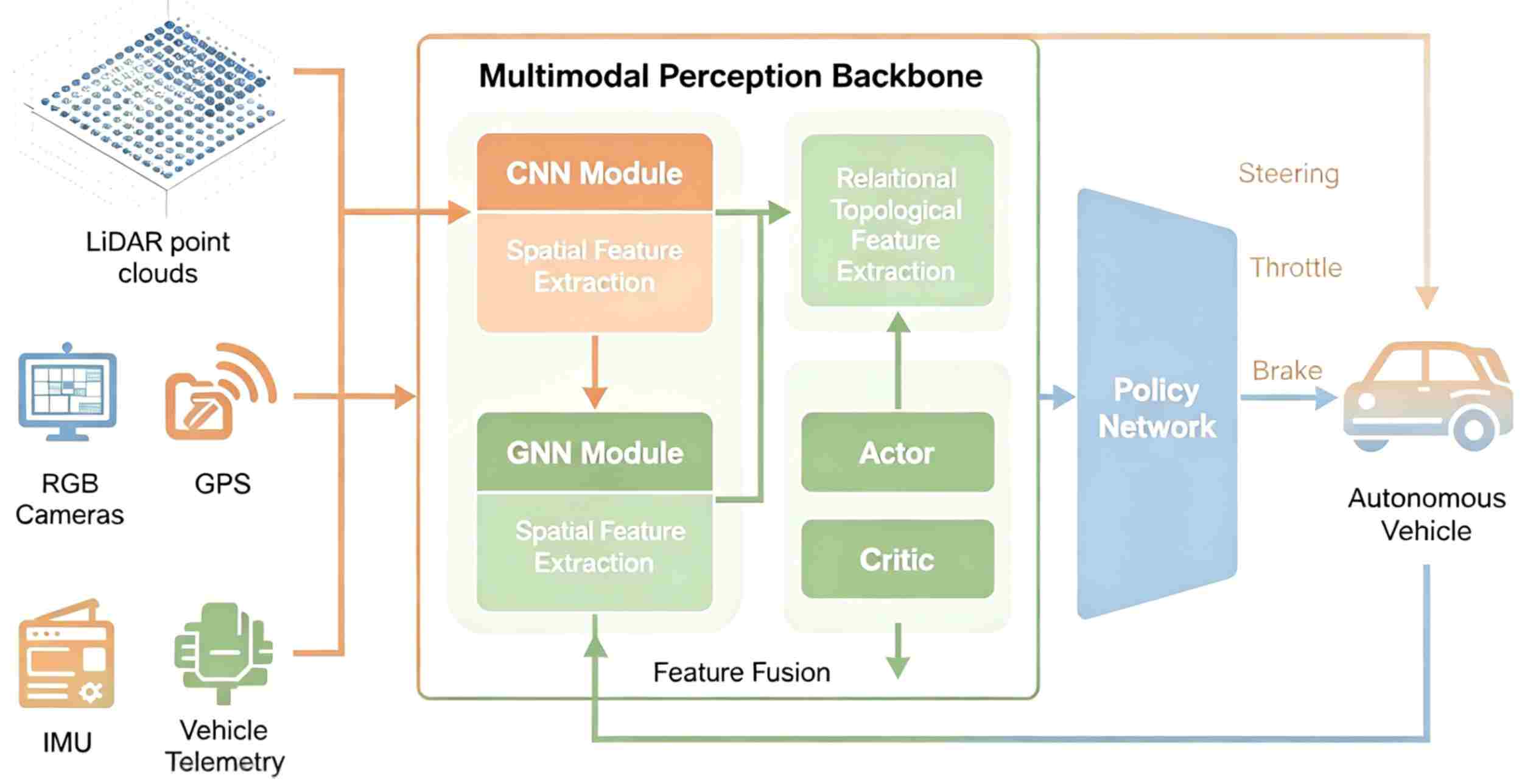
Deep Reinforcement Learning (DRL) is a general framework for end-to-end autonomous urban driving. It combines perception, planning, and control. Research on end-to-end deep reinforcement learning (DRL) path planning in complex urban environments, addressing issues such as moving obstacles, irregular traffic conditions, and dynamic environments. A framework has been introduced that combines convolutional neural networks and graph neural networks to create inputs for feature extraction and relational reasoning. The framework will simultaneously use multiple sensors, such as LiDAR point clouds, RGB camera images, and vehicle telemetry data. By using the Proximal Policy Optimization algorithm, a decision-making system with an actor-critic architecture was constructed to achieve continuous control and stable policy updates. The experiments used high-fidelity simulators to create scenarios from the CARLA and NuScenes datasets, simulating various traffic and weather conditions. This method outperforms traditional graph-based planners and recent learning-based baselines. The average route completion time is 102 seconds (compared to 125 seconds for A*), the normalized path length variance is reduced, and the median collision rate per episode is only 0.8 times. Ablation studies indicate that graph feature modeling and reward shaping are crucial for good generalization and safety. For supporting adaptive, collision-free, and interpretable real-world urban deployments, a well-designed deep reinforcement learning framework can significantly enhance the efficiency and reliability of urban autonomous vehicle navigation.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Zuzanna Domańska, Franciszka Kaczorowska, Miron Laskowski

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





