Embedded Deployment and Optimization of Quantized YOLOv7-Tiny for UAV-Based Vehicle Counting
DOI:
https://doi.org/10.64972/jaat.2025v3.134p7e:76-90Keywords:
Edge Computing, Embedded Systems, Deep Learning, Model Compression, UAV Perception, Vehicle DetectionAbstract
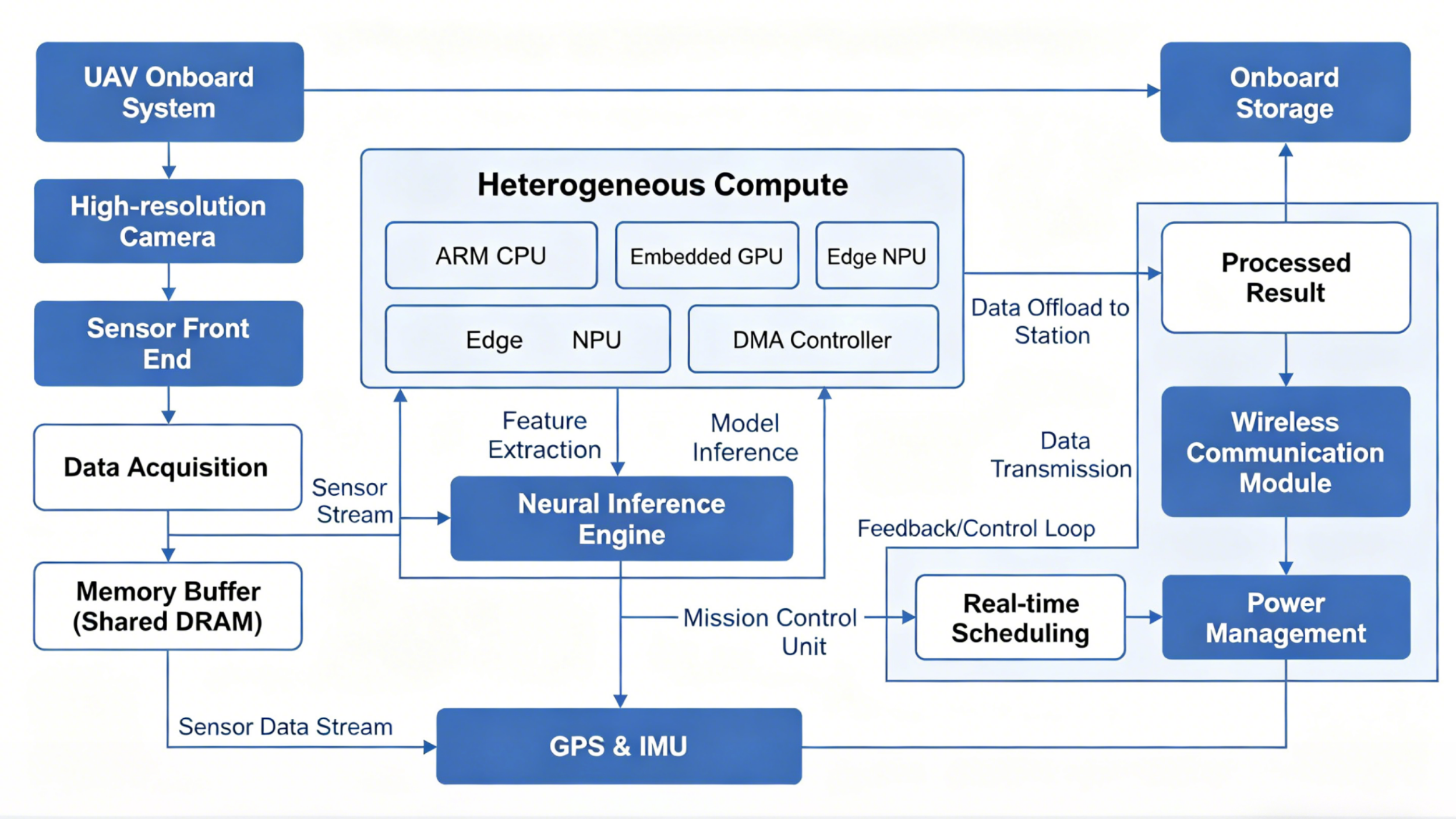
With the increasing demand for smart city traffic management, it is necessary to equip drones with edge AI to count vehicles in real-time. This study investigates the technical issues of deploying high-precision vehicle detection in complex aerial environments using the quantized YOLOv7-Tiny network. A general optimization scheme is proposed for various embedded devices. The solution includes cross-platform scheduling, mixed-precision quantization, and state-of-the-art model pruning. Experimentally collect large-scale aerial data, perform detailed annotation, and conduct systematic benchmarking on various edge devices. According to the above results, the average accuracy of the optimized model is 82.3%, with an inference speed exceeding 70 frames per second, outperforming other lightweight baselines by 7%, and reducing nearly threefold after quantization and pruning. Based on scene analysis, drone detection performs well in different urban areas; the energy consumption and latency of drone deployment are relatively low. Smart city applications can be achieved through efficient edge deployment, providing reliable traffic information via autonomous drones without relying on the cloud. Improving the platform's generalization ability to meet the changing demands of intelligent aerial perception, adapting to extreme occlusions, and dynamic optimization strategies are part of the current issues and future directions.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Giorgos Katsaros, Katerina Papageorgiou, Dimitris Nikolaidis, Georgios Papadopoulos

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





