Modified Faster R-CNN with Adaptive Feature Extraction for Fully Visual Autonomous UAV Power Line Patrol
DOI:
https://doi.org/10.64972/jaat.2024v2.255p11e:149-162Keywords:
Intelligent Perception, R-CNN, UAV Control, Power Line InspectionAbstract
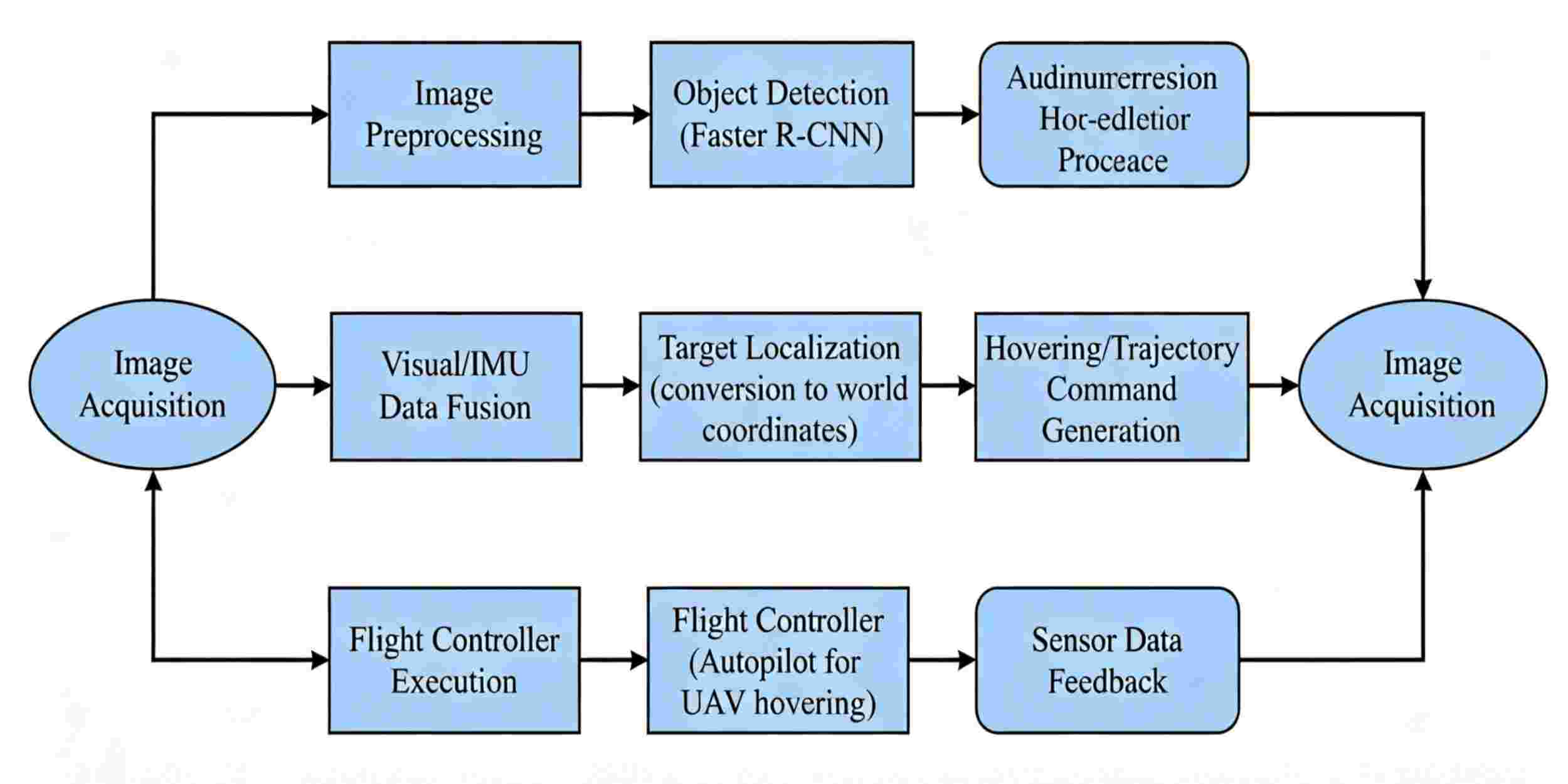
Inspection and maintenance of contemporary electricity distribution networks are currently problematic; in particular, complexity and huge scale make the task more challenging. Currently, the requirements for speed, safety, and range cannot be reached by traditional manual inspection techniques. To address issues including visual confusion, component variety, and limits in real-time operation of the current systems, an all-UAV-based automatic power line inspection system is being introduced. In settings with poor signal quality and noisy backdrops, the Adaptive Object Detection Module uses a modified version of the faster-RCNN algorithm to detect different power-grid components. created a closed-loop control system that precisely issued UAV flight commands for steady and accurate hovering close to inspection objects by integrating the output of high-frequency vision. Advanced augmentation for detection in conjunction with dynamic models and feedback integration for control; multi-scale feature extraction in conjunction with an attention mechanism. The average detection accuracy reaches about 84.5%, the hovering error is within ±10cm, and the control system lag-time is below millisecond levels, according to various testing results based on simulated real-world data. Furthermore, pooled data also demonstrated improved efficacy and safety in practice, according to the aforementioned result. Modular engineering design is easily adaptable to more complicated grid topology situations or enlarged for multi-iUAV cooperation. An approach to the intelligence of vision-based airborne inspection of critical infrastructure that is both practical and scalable is presented in this paper.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Liliana Kaliszowa, Sabina Franciszka Gola

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





