Multi-Sensor Fusion-Based Lane Detection Using Convolutional Neural Networks
DOI:
https://doi.org/10.64972/jaat.2025v3.216p28e:376-391Keywords:
Multi-Modal Fusion, Deep Learning, Lane Detection, Sensor IntegrationAbstract
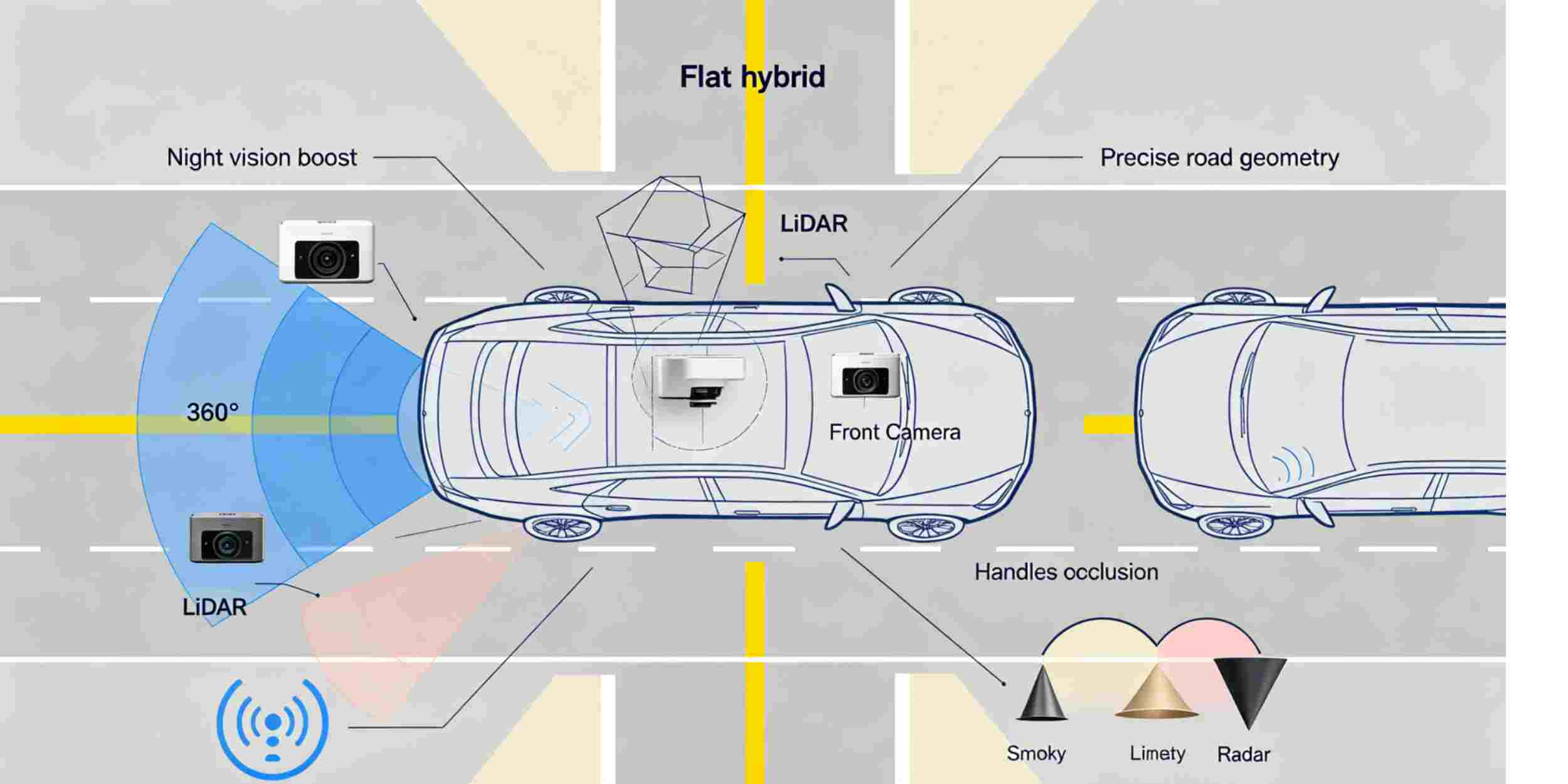
Precise and stable lane recognition is necessary for the current smart transportation system to operate safely and for vehicle location and path stability. Conventional vision-based techniques struggle in real-world situations like poor illumination, bad weather, or partial occlusion; as a result, the identification results are erratic. This paper proposes a new Lane Detection framework that combines various feature extraction techniques in a deep learning model to incorporate optical, LiDAR, and radar data. In this way, a strong attention-driven feature fusion module is constructed using precise temporal alignment and modality-specific encoding. For analysis, a sizable dataset of 151,708 annotated photos featuring various lanes, environmental settings, and urban-highway transitions has been gathered. According to the aforementioned studies, the suggested system's mean detection accuracy and F1 score were 95.3% and 94.6%, respectively. With a metric fall of only 5.1% in the poor weather and occlusion test, the framework performed reasonably well. Stable results were obtained for both domain shift and night scenarios with an F1 fluctuation of less than 4%. The approach is still computationally demanding and performs worse when sensing data is severely corrupted, even if it has produced the best results thus far in terms of reliability and flexibility. According to this study, the integrated multi-sensor deep perception system works well under a variety of real-world traffic scenarios and is reliable and generalisable for lane detection.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Szymon Sadlak, Walerian Wąsik, Cyryl Borowski

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





