A Novel Deep Learning Approach for Multi-Sensor Fusion in Autonomous Vehicle Perception
DOI:
https://doi.org/10.64972/jaat.2025v3.211p23e:308-321Keywords:
Sensor Fusion, Autonomous Driving, Deep Learning, Robust PerceptionAbstract
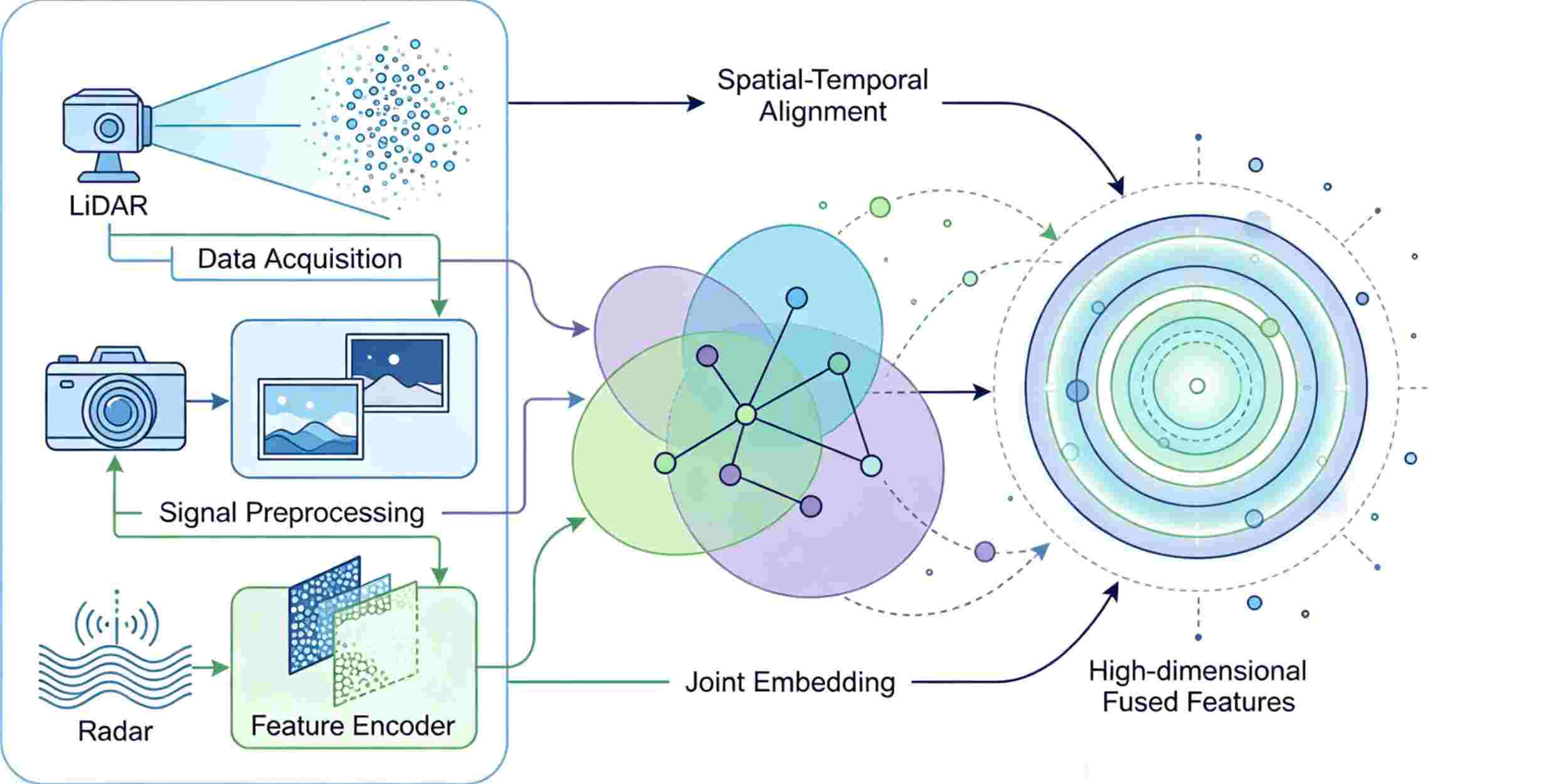
An effective autonomous driving perception system must function well in real-world settings. In order to enhance situational robustness and environmental perception, LiDAR, radar, and camera data must be combined. This study examines the ongoing challenges in multi-sensor fusion. First, create a deep learning-based fusion framework that can manage the diverse spaces, timings, and semantics of the multiple sensors in a systematic manner. In order to implement attention-based fusion, adaptively extract features, and dynamically estimate uncertainty in the perception pipeline for context-aware decision-making, a new structure has been developed. Perform multi-stage attention weighting and cross-modal integration after methodically encoding and aligning each sensor stream separately. Experiments using a large public dataset have demonstrated that the suggested approach is more suited for real-world autonomous driving scenarios. The new framework is still a real-time system with minimal latency and an inference speed of 27 frames per second; quantitatively, it has improved the mean Average Precision (mAP) by more than 6 percentage points. To make sure that multiple item tracking and detection remain accurate, robustness has been evaluated in inclement weather and sensor deterioration. In summary, this study has offered a comprehensive and workable solution to the perception issue in intelligent vehicles, and experimental results have demonstrated its effectiveness, flexibility, and potential use in urban traffic scenarios.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Paulina Patrycja Królowa, Patryk Pacholski, Oliwier Orzechowski

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





