Universal Sensor Fusion Architecture for Cooperative Perception in Intelligent Connected Vehicles
DOI:
https://doi.org/10.64972/jaat.2025v3.207p19e:252-266Keywords:
Automotive, Sensor Fusion, Cooperative Perception, Intelligent Vehicles, Edge Computing, System ArchitectureAbstract
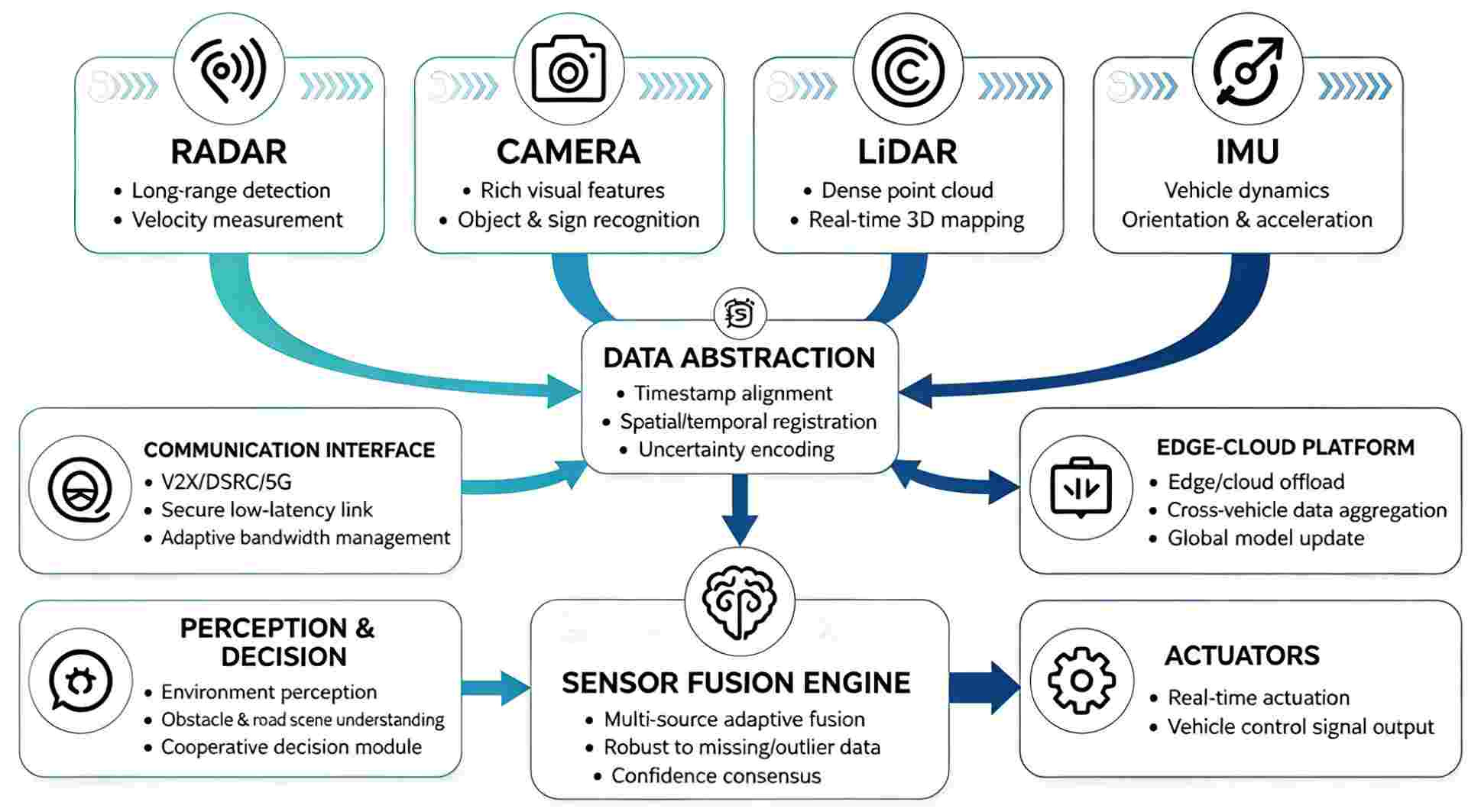
Although intelligent connected vehicles have strong perception capabilities in complex and dynamic environments, they still cannot improve people's lives. This paper proposes a universal sensor fusion architecture for cooperative perception in multi-vehicle groups. By integrating multimodal data from cameras, LiDAR, radar, and other sensors through distributed fusion and unified data abstraction, this framework is modular and protocol-agnostic. Through large-scale real-world deployments and detailed simulations, experimental validation is conducted to assess its effectiveness in various environments, such as highways, urban traffic, and adverse weather conditions. Quantitative data indicate that the proposed system achieves a detection rate of over 92% in most scenarios. In adverse weather or at night, the system's detection rate drops to 83-88%, but its latency remains relatively low, with end-to-end latency not exceeding 130 milliseconds under maximum load. A solution has been proposed that responds quickly to anomalies, is fault-tolerant to sensor failures, and achieves efficient resource utilization through edge-cloud collaboration and adaptive fusion algorithms. This structure is suitable for expansion and adjustment, which can enhance the collaborative perception performance and reliability of intelligent vehicle networks, and is also feasible in other aspects. This paper discusses the scope and feasibility of applying this architecture in the creation of large-scale automated transportation systems.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Franciszek Adrian Błaszczyk, Artur Majewski, Celina Kubiak

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





