Dynamic Sensor Fusion Algorithm Enhances SLAM Performance in Unknown Environments
DOI:
https://doi.org/10.64972/jaat.2025v3.205p17e:218-233Keywords:
Sensor Fusion, SLAM, Autonomous Robotics, Real-Time Processing, Robust MappingAbstract
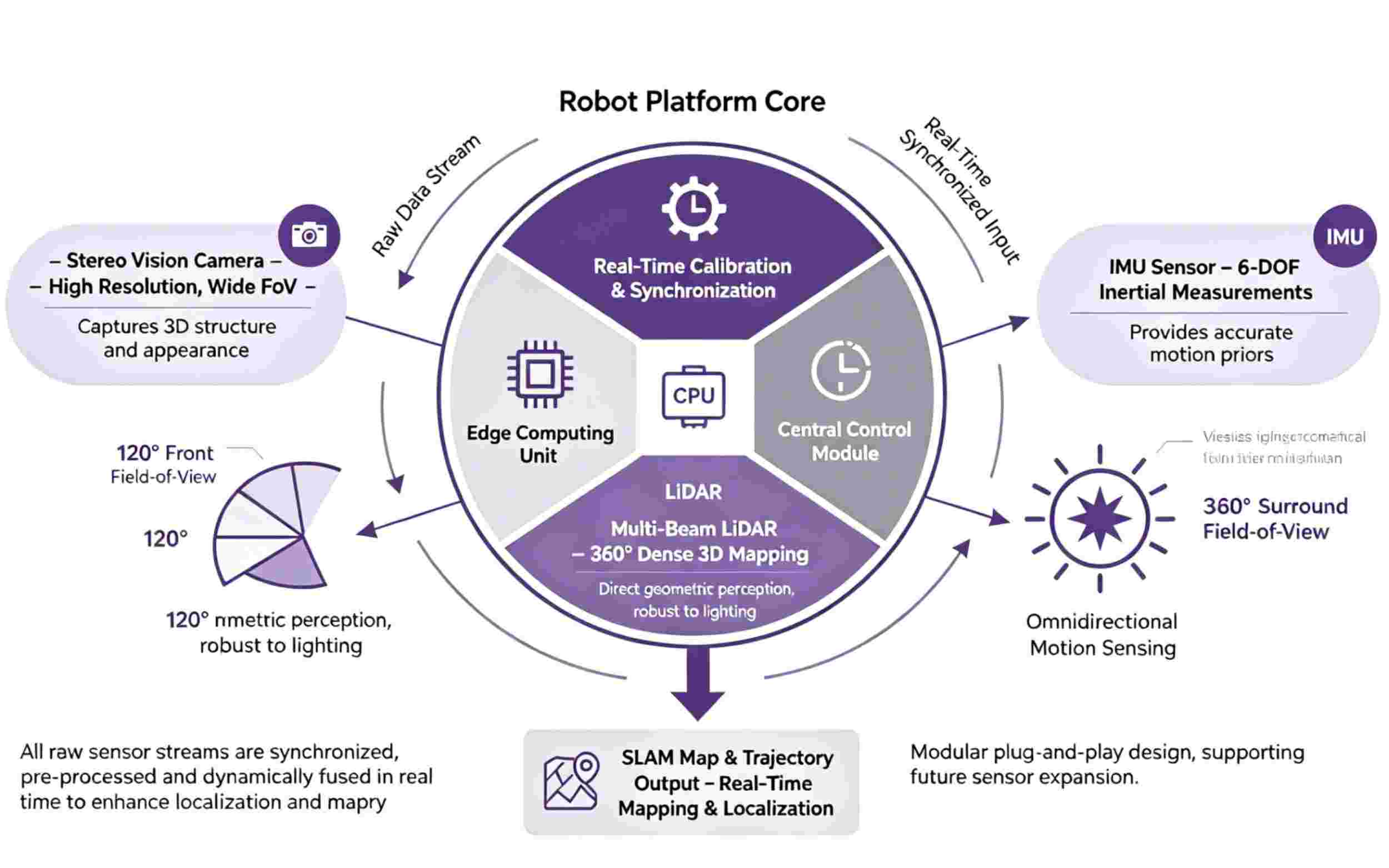
Robots operating in unfamiliar and unstructured surroundings can now perform better with Simultaneous Localisation and Mapping (SLAM) thanks to dynamic sensor fusion. By building a system that can adaptively combine the data streams of vision, inertia, and LiDAR through online reliability analysis and dynamic weight adjustment, this work aims to address the long-standing problems of robust real-time localisation and mapping (SLAM). To increase the system's resilience to sensor dropouts, environmental variations, and abrupt scene changes, continuously evaluate each sensor's degree of trust in the suggested system and dynamically modify its weights while it is in use. The approach has been proven to reduce root-mean-square trajectory error by more than 30% when compared to static fusion and single-modality baselines, and it has been confirmed in both structured indoor and challenging outdoor experiments. The findings of the robustness test demonstrate that the system can still map and locate the robot normally after 40 frames following a sensor failure. According to ablation research, both are required for online reliability estimation and adaptive fusion to operate consistently. The aforementioned findings indicate that the technique has been refined to lower the mean latency to less than 40 milliseconds for designing real-time processing. In general, this approach has raised the bar for SLAM's resilience, precision, and effectiveness in domains lacking prior information and environmental consistency presumptions.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Olaf Tadeusz Truskolaski, Barbara Grabowska, Eugeniusz Stępień

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





