Motion Prediction in Crowded Spaces Based on Multi-Sensor Fusion and Reinforcement Learning
DOI:
https://doi.org/10.64972/dea.2025.v4i2.2417d:86-100Keywords:
Multi-Sensor Fusion, Reinforcement Learning, Trajectory Prediction, Urban Robotics, Crowd DynamicsAbstract
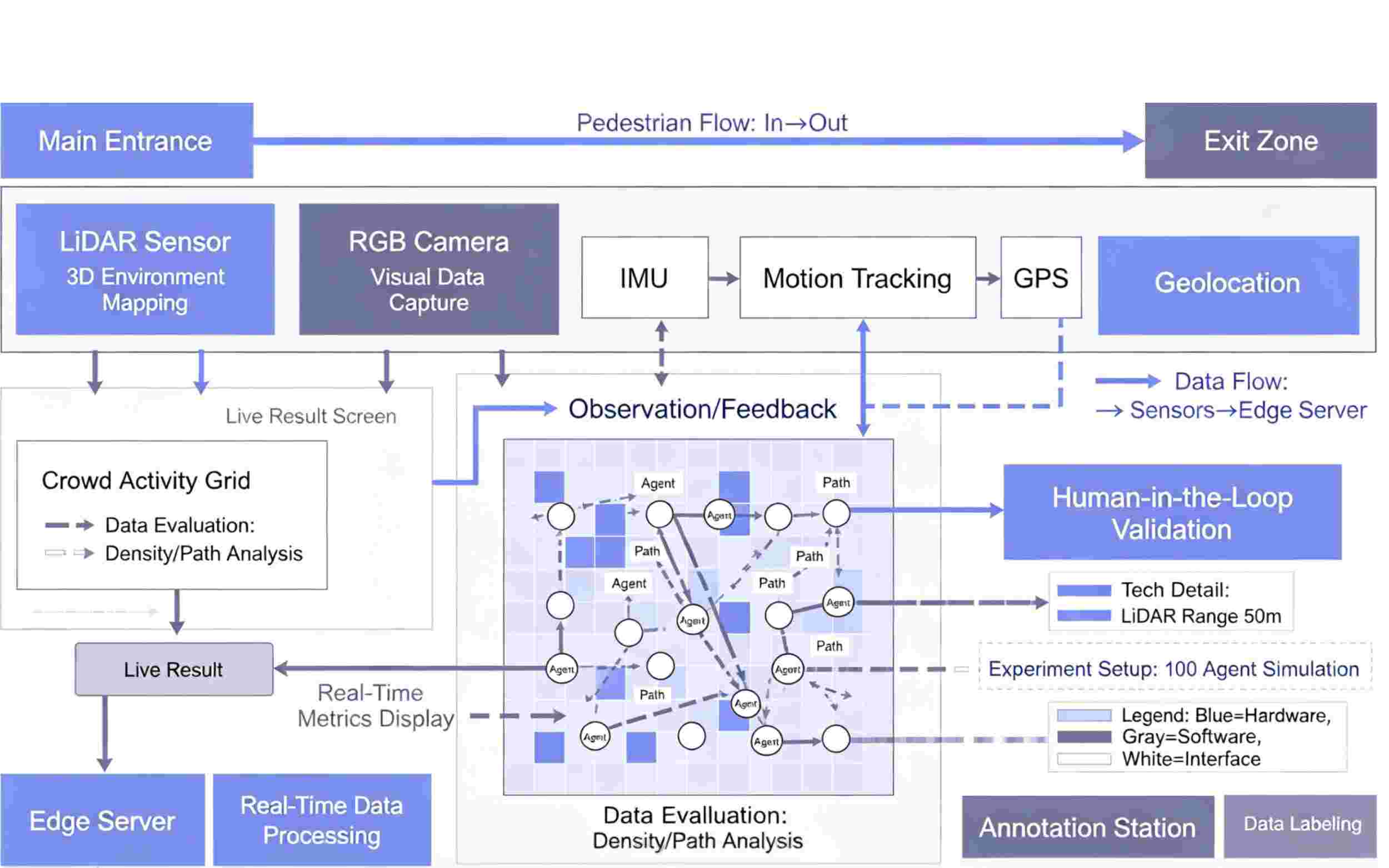
In this study, the topic of motion prediction in congested environments is addressed using multi-sensor fusion and reinforcement learning. To guarantee the reliable connection of a high-frequency LiDAR, a high-resolution RGB camera, and an Inertial Measurement Unit for real-time observation of intricate crowd behavior, a high-level system architecture has been constructed. Attention-based adaptive aggregation is the first kind of feature fusion, while a crowd-considering reinforcement learning module is the second. The suggested approach outperformed the top-performing benchmark algorithms by 19% to 24%, with an average displacement error of 17.3 cm in low-density areas and 25.4 cm in high-density areas based on the evaluation findings of the standard and real-world urban datasets. Additionally, the model has good robustness; the final displacement error in unseen, obstructed settings is still less than 27.1 cm, and the forecast accuracy decreases by no more than 12% in a noisy environment or after a sensor dropout. The technique can be reliably applied in the fields of intelligent transportation and robot navigation in unpredictable situations, according to the aforementioned trials.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Nikola Popović, Goran Blagojević, Čedomir Radošević

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.




