Real-Time Multi-Sensor Data Synchronization Algorithm for High-Precision Environmental Mapping
DOI:
https://doi.org/10.64972/dea.2025.v4i2.1961d:1-13Keywords:
Multi-Sensor Fusion, Real-Time Synchronization, Environmental Mapping, Statistical Modeling, Drift Compensation, Outlier Detection, Autonomous Systems, Embedded ComputingAbstract
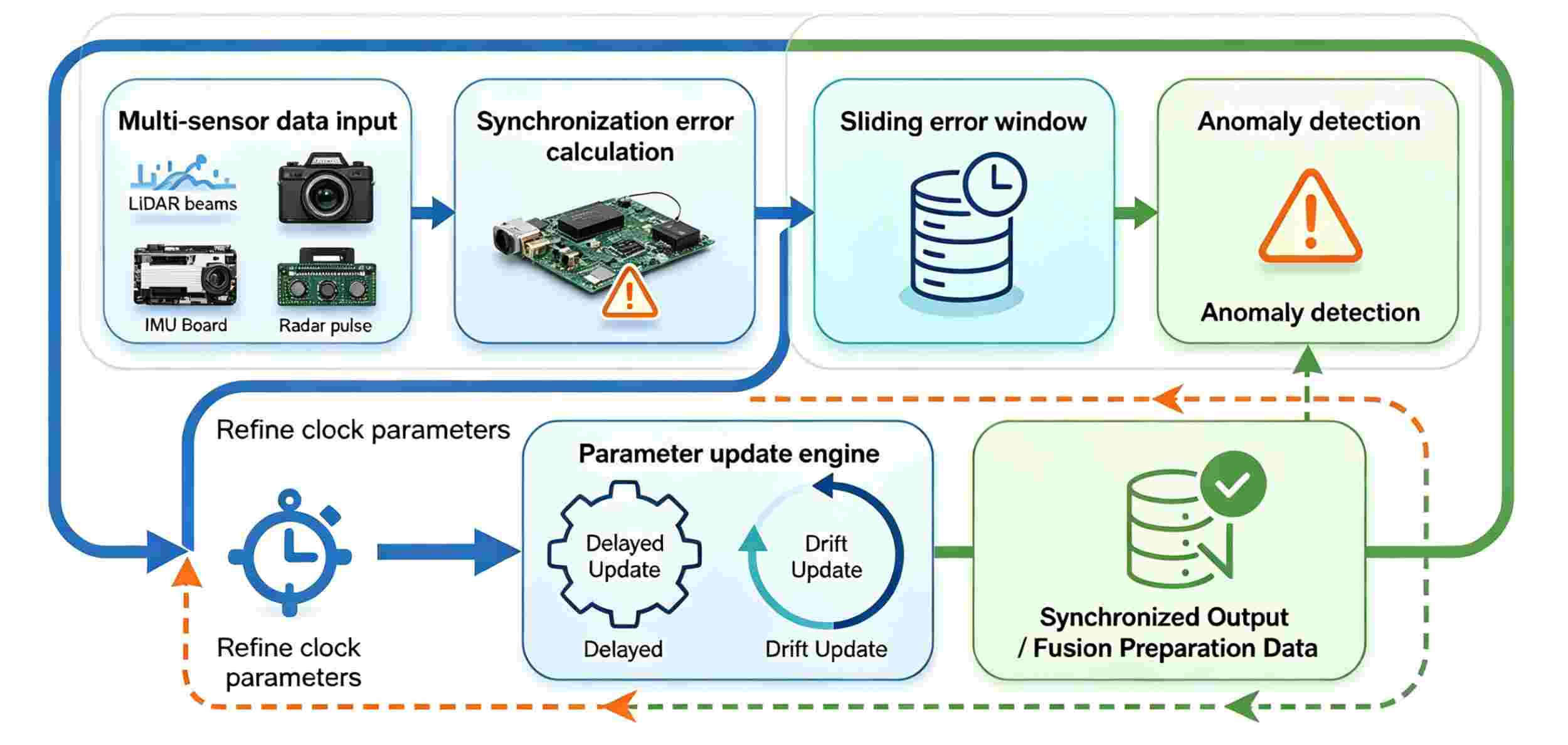
This paper studies a real-time synchronization algorithm for fusing multiple sensor data in high-precision environmental mapping systems. A real-time synchronization algorithm for fusing multiple sensor data in high-precision environmental mapping systems. The sensors required for spatial reference in intelligent vehicles and autonomous robots include cameras, LiDAR, and inertial measurement units. Using statistical models to process random noise, drift, and time delays in the data from heterogeneous sensors. Recursive optimization is used for online estimation of delay and drift parameters. It is robust to environmental changes and uses a sliding window method to identify outliers. Compared to traditional post-processing alignment methods, this algorithm achieved significantly lower average absolute synchronization errors, below 1.8 milliseconds, in comprehensive experiments with both simulated datasets and real sensor data. Moreover, the system is capable of meeting various operational conditions and has low computational latency and resource consumption in real-time environments. According to standard evaluations, these maps have higher accuracy. According to different situations, the overlap rates of the maps are 0.84 for highways and 0.92 for urban areas. The aforementioned study indicates that the algorithm has a low computational cost and is suitable for high-quality large-scale maps in real-time autonomous vehicle applications. Therefore, it is highly recommended to use the aforementioned method for embedded systems that require high reliability and data synchronization. Current research indicates that large-scale real-time sensing systems can handle multiple sensors simultaneously.
Downloads
Published
How to Cite
Issue
Section




