Application of Quantum Reinforcement Learning in Autonomous Unmanned Aerial Vehicle Navigation
DOI:
https://doi.org/10.64972/jaat.2025v3.240p44e:604-617Keywords:
Quantum Reinforcement Learning, UAV Navigation, Autonomous Systems, Path Planning, Intelligent RoboticsAbstract
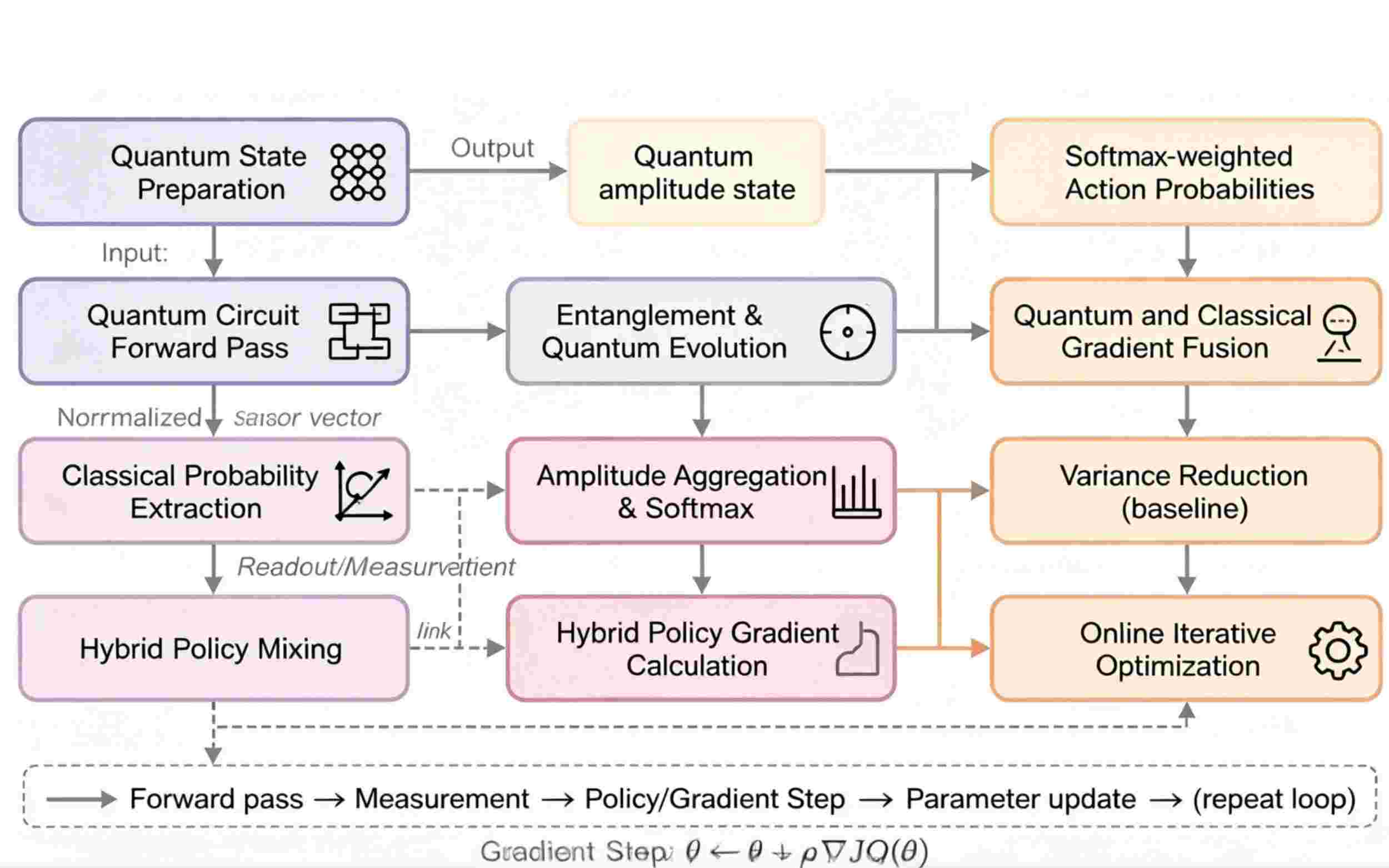
An intelligent adaptation technique is necessary due to the complexity and unpredictability of the air space, and autonomous unmanned aerial vehicle (UAV) navigation uses quantum reinforcement learning (QRL) as an advanced control mechanism. This work suggests quantum-inspired encoding and optimization algorithms for policy learning in order to overcome the shortcomings in efficiency and scalability of conventional and deep reinforcement learning approaches. The technique employs quantum-parametric policy optimization on a hybrid quantum-classical architecture after forming UAV navigation as a Markov Decision Process and adding quantum amplitude encoding. Dynamic obstacle and random wind disturbance experiments will be carried out in a high-fidelity 3D simulation environment. QRL has decreased energy usage by up to 17% and increased the top classical RL baseline's convergence speed by 40%. Even in inclement weather, the success rate remains around 95%, and the minimum obstacle clearance never falls below 1.8 meters. Analysis shows that QRL yields safer, more robust and sample-efficient policies that are better at generalizing to unseen maps and disturbance-heavy environments. Based on the above results, the technical feasibility and engineering value of quantum-enhanced learning algorithms for robust UAV autonomous navigation have been demonstrated; thus, they can serve as a model for future intelligent aerial decision systems.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Veljko Perić, Milan Živković

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





