Noise-Aware Variational Quantum Algorithms for Robotics Optimization Problems
DOI:
https://doi.org/10.64972/jaat.2025v3.235p39e:532-546Keywords:
Variational Quantum Algorithms, Noise Mitigation, Hybrid Systems, Experimental BenchmarkingAbstract
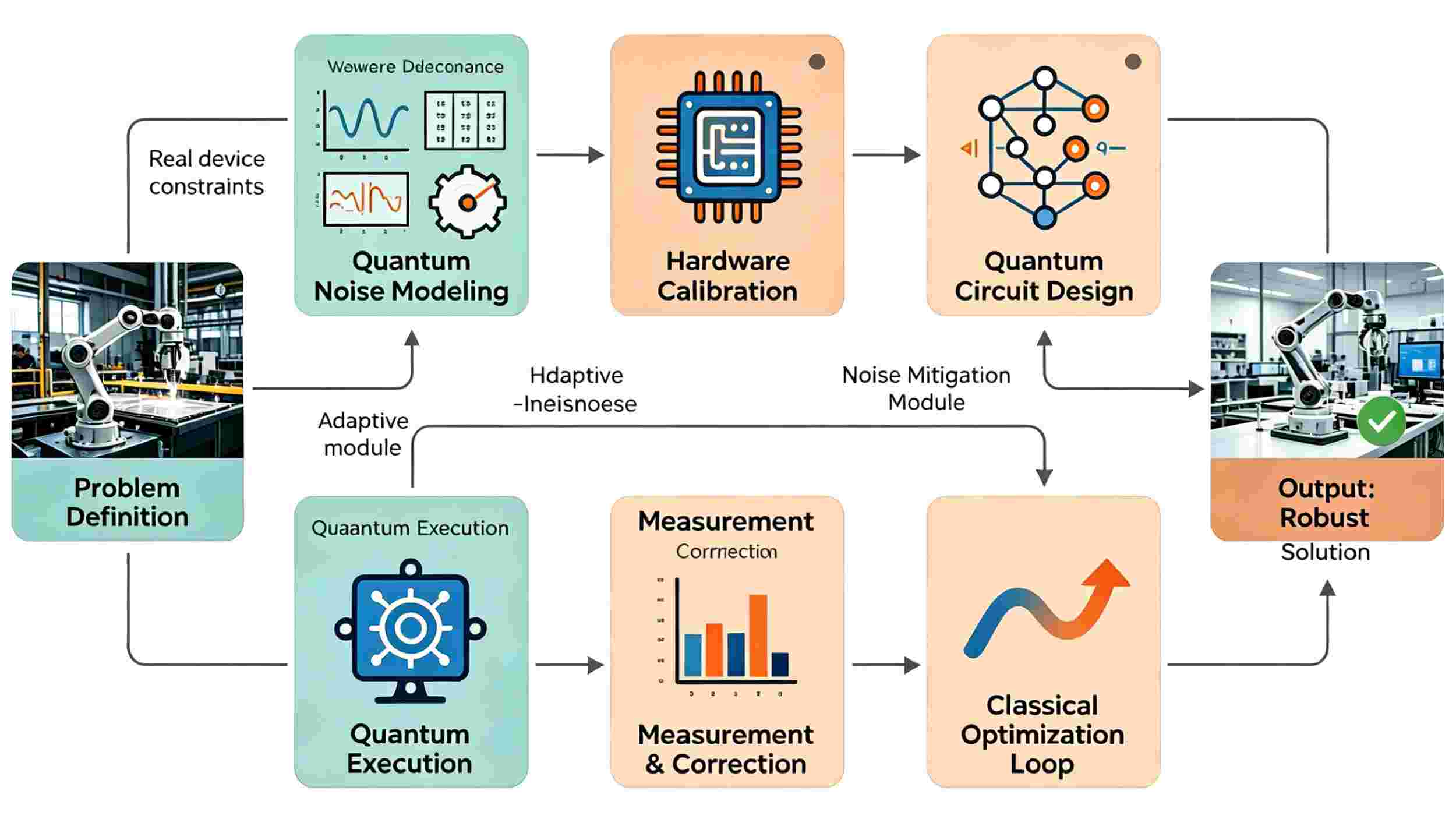
In the field of robotics, optimization problems with high computational costs, such as motion planning, multi-robot cooperation, and manipulation, are constrained by the exponential growth of the complexity of classical algorithms. This paper discusses practical methods for robot optimization, specifically using noise-aware variational quantum algorithms (VQAs) on current noisy intermediate-scale quantum hardware. To address the inherent errors of quantum devices, a specific framework has been proposed. The framework clearly defines noise modeling, adjusts error mitigation methods, and creates quantum-classical workflows. Using actual quantum computers and high-fidelity simulations, this paper will systematically evaluate four benchmark robotic domains. The statistical data from numerous experiments (up to 100 trials per scenario) indicate that, in the presence of significant hardware noise, noise-aware VQAs can improve the target value by up to 14% compared to standard quantum methods and reduce the number of convergence iterations by 45%. Cross-platform tests indicate that all six robotic tasks run stably, with an accuracy rate exceeding 90% for all devices. In real-world environments, this trajectory generation method performs excellently under noisy conditions when using physical robots. In order to ensure the accuracy of quantum accelerated optimization in robotics, it is necessary to reduce noise. According to the aforementioned research, reducing noise can be practically applied outside of laboratory conditions.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Marta Kochanowa, Jadwiga Herdzikowa, Celina Dembowska

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





