Robust Multi-Sensor Fusion for Perception in Harsh Weather Conditions
DOI:
https://doi.org/10.64972/jaat.2025v3.232p36e:489-502Keywords:
Sensor Fusion, Adverse Weather, Autonomous Vehicles, Bayesian MethodsAbstract
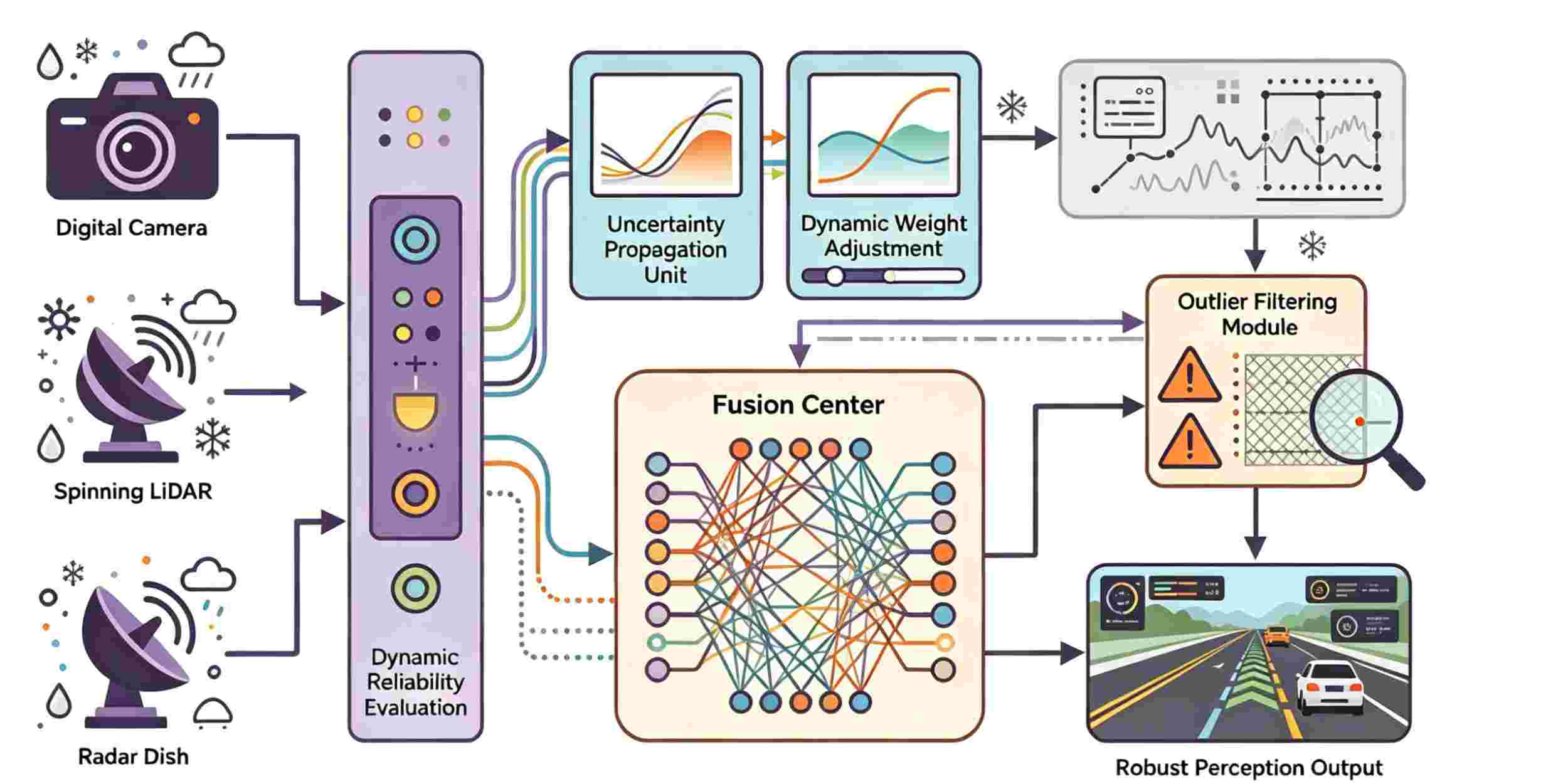
It is still necessary to enhance autonomous driving and other intelligent robots' perceptive reliability in inclement weather. The performance of cameras, LiDAR, and radar sensors will be diminished by environmental conditions like rain, fog, and light variations, which will result in increased noise, observational gaps, and decreased recognition accuracy. This work proposes a novel adaptive Bayesian multi-sensor fusion algorithm that can automatically modify fusion weights in real time and adjust the weights of various sensors in response to environmental changes. The stability of perception will be enhanced by a novel structure based on uncertainty propagation and probability theory. For the experiment, four common unfavourable weather conditions—light rain, heavy rain, dense fog, and sun glare—were chosen for both a simulation and an actual driving environment. According to the aforementioned findings, under all test circumstances, the adaptive fusion approach has been demonstrated to increase the perception accuracy of classical static fusion by at least 7%. Furthermore, the system's error rate and perception failure incidence are more than 50% lower than those of single-sensor and deep learning-based baselines. The findings show that real-time uncertainty estimation and the dynamic and irregular nature of disturbances are the two primary causes of the challenge in dealing with environmental changes. This research proposes a system that can successfully handle the ongoing issues of all-weather autonomous driving perception while exhibiting strong stability both on average and under challenging conditions
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Adrian Dziuba, Feliks Karpiński, Henryk Kasprzak

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





