Dynamic Path Optimization for Intelligent GPS Systems Based on a Hybrid Evolutionary Algorithm
DOI:
https://doi.org/10.64972/jaat.2025v3.226p31e:420-433Keywords:
Hybrid Evolutionary Algorithm, Dynamic Path Planning,, Intelligent Transportation System, Real-Time Routing, Urban MobilityAbstract
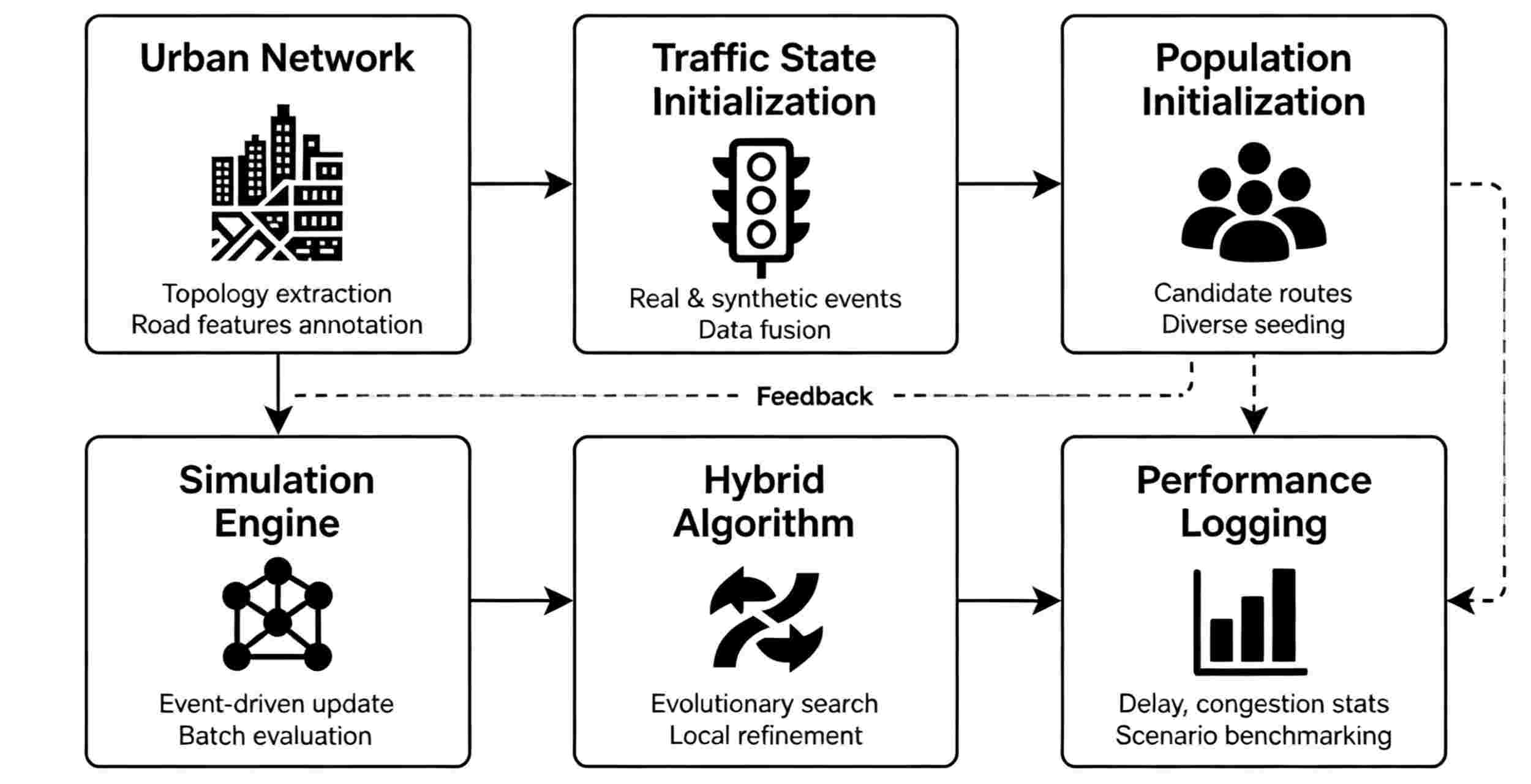
With the increase in cities and cars, transportation networks have also become more complex. This paper introduces an intelligent dynamic path optimization method based on a hybrid evolutionary algorithm. This algorithm is suitable for urban traffic, employing deterministic local optimization and global population search. Due to its modular architecture, the framework can continuously learn, dynamically adjust parameters, and stream real-time traffic data. Rigorous simulation experiments were conducted on large-scale urban data. The results show that compared to traditional genetic algorithms and differential evolution algorithms, the hybrid algorithm reduced travel time by 14 to 23 percentage points and shortened routes by 17.4 percentage points during peak period disturbances. In all cases, the system demonstrated extremely high computational efficiency and optimality, with convergence variation of less than 0.8% when using multiple random seeds. Hybrid evolutionary computation conducts real-time exploration and development, improving the accuracy and speed of urban path optimization. This method provides a feasible and scalable solution for future intelligent transportation systems to improve daily commuting, logistics, and emergency response. Future research will delve deeper into the behavior models of large-scale deployments in heterogeneous sensor networks.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Bogna Cyrowa, Kinga Jurowa, Grażyna Marianna Kos

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





