Adaptive Multi-Sensor Fusion for Autonomous Navigation Based on Bayesian Networks: An Application-Oriented Study
DOI:
https://doi.org/10.64972/jaat.2025v3.208p20e:267-279Keywords:
Sensor Networks, Sensor Fusion, Reliability Assessment, Autonomous Systems, Localization, Bayesian Methods, Fault Tolerance, Real-Time ProcessingAbstract
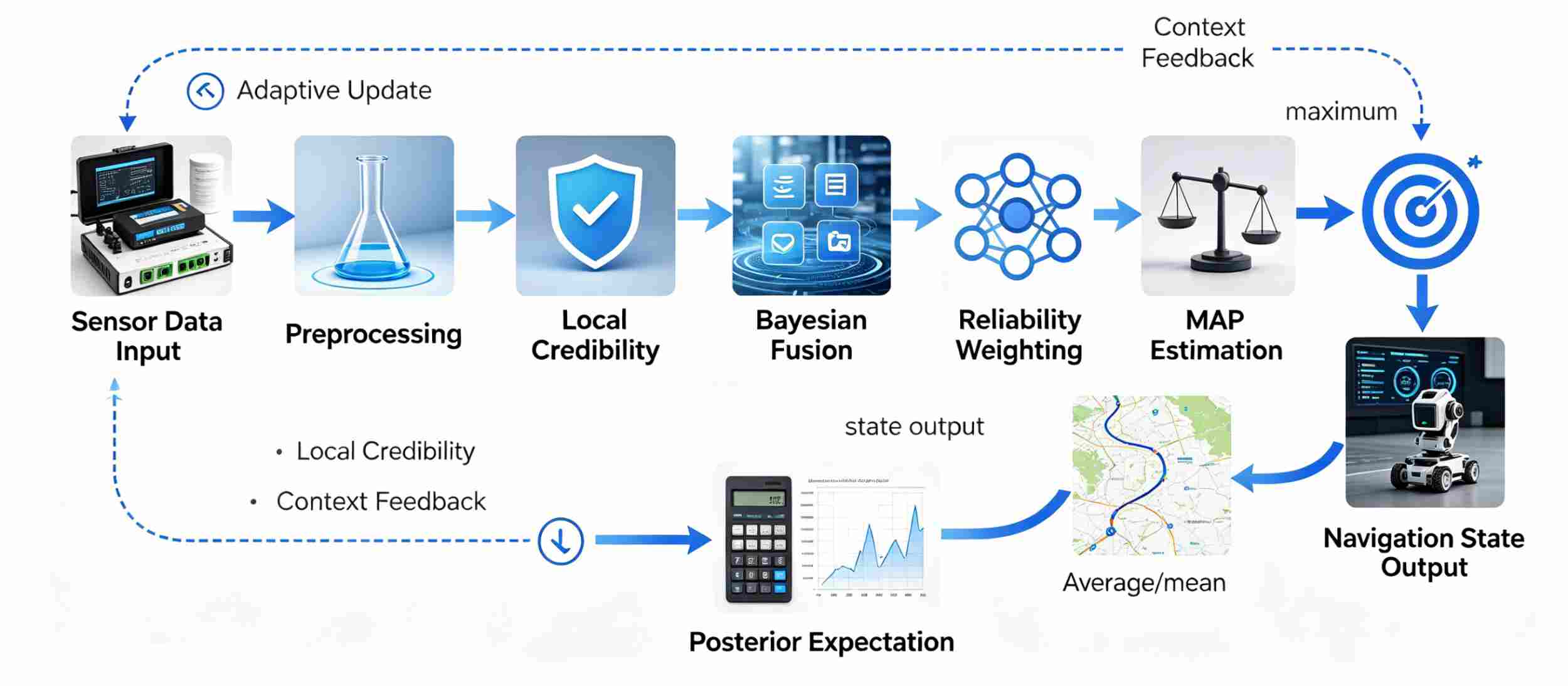
This paper proposes an adaptive multimodal sensor fusion framework aimed at improving the positioning accuracy and robustness of intelligent systems in dynamic and harsh environments. This paper studies the integration of heterogeneous sensor data, sensor faults, modal loss, and environmental interference. The fusion strategy will be dynamically adjusted based on the reliability of the sensors. By using Bayesian reliability weighting, a scalable architecture can be created to handle large volumes of high-dimensional and diverse sensor data. Simulated tests were conducted in both indoor and outdoor environments. In order to compare the performance of the proposed system with traditional methods (such as weighted fusion, simple averaging, and neural network fusion). The above results indicate that the average positioning error for structured tasks is sub-decimeter. Moreover, even if 40% of the sensor channels are damaged, the accuracy of this framework will still remain above 0.9, and it outperforms other algorithms in terms of mean error and error variance. According to the analysis of heat maps and radar charts, this method performs well under various faults and environmental changes. Scalability tests indicate that adding more sensors is still beneficial; however, after five additions, the performance improvement is almost negligible. The new technology runs in real-time, averaging less than 25 milliseconds per frame. The framework significantly improves positioning accuracy, robustness, and efficiency through adaptive sensor fusion, and is now used in complex applications such as robotics, autonomous driving, and smart factories.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Gabriela Jarosz, Elżbieta Cybulska

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





