Adaptive Multi-Sensor Integration for Autonomous Driving Under Complex Conditions Based on Deep Reinforcement Learning
DOI:
https://doi.org/10.64972/jaat.2025v3.206p18e:234-251Keywords:
Autonomous Driving, Deep Reinforcement Learning, Multi-Sensor Fusion, Reliability Modeling, Robust PerceptionAbstract
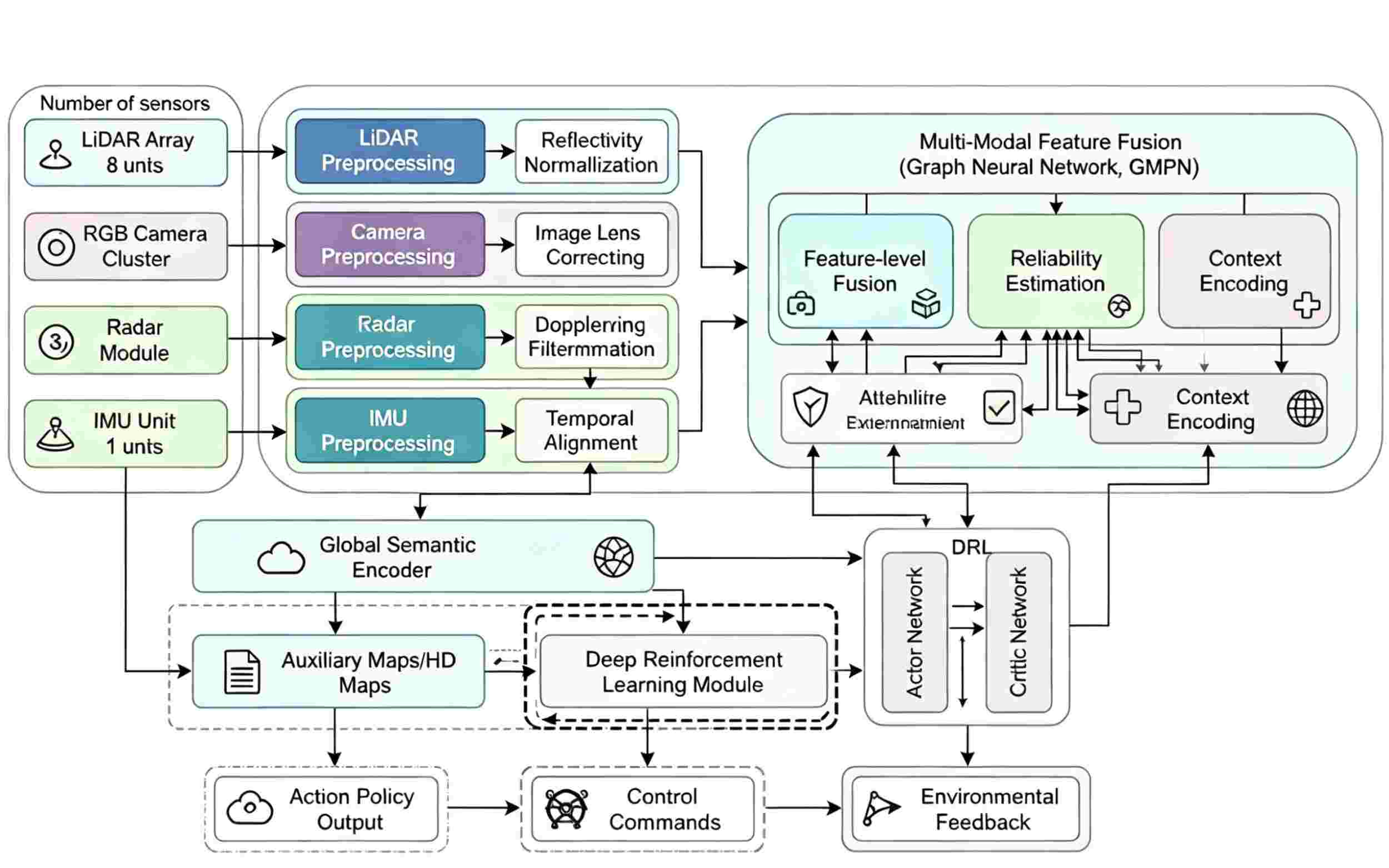
The issue of strong environment perception for self-driving cars in various settings will be discussed in this study. Create a deep reinforcement learning-based adaptive multi-sensor fusion framework to integrate LiDAR, cameras, radar, and inertial sensors for optimal perception and control. The proposed method can assess the dependability of the real-time sensors and utilise hierarchical feature fusion to weigh the various streams of these sensors in accordance with their signal correctness and operating environment. A closed-loop autonomous driving platform has been tested in various urban and suburban settings, inclement weather, etc. According to the aforementioned quantitative results, the suggested approach maintains a detection accuracy of over 92.6% in challenging situations with combined sensor degradation, achieving a mean Intersection over Union (mIoU) of 0.852 for object-level segmentation. The adaptive framework has cut the system's recovery time by 34% and decreased the crucial perception error by 41.3% when compared to the static fusion model. Additionally, the average inference latency is less than 37 ms. In order to solve the issues of sensor degradation and distribution shifts in conventional fusion systems, a dynamic and context-aware fusion mechanism has been devised to enhance the safety and dependability of autonomous driving. The suggested approach will provide a solid foundation for the widespread implementation of reliable and adaptable intelligent transportation systems.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Nikodem Arkadiusz Brzózka, Robert Bogdan Ostrowski

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





