Reinforcement Learning-Based Self-Calibration Algorithms for Industrial Robots
DOI:
https://doi.org/10.64972/jaat.2025v3.182p10e:117-130Keywords:
Reinforcement Learning, Robot Calibration, Industrial Automation, Adaptive Control, Kinematic Modeling, Intelligent ManufacturingAbstract
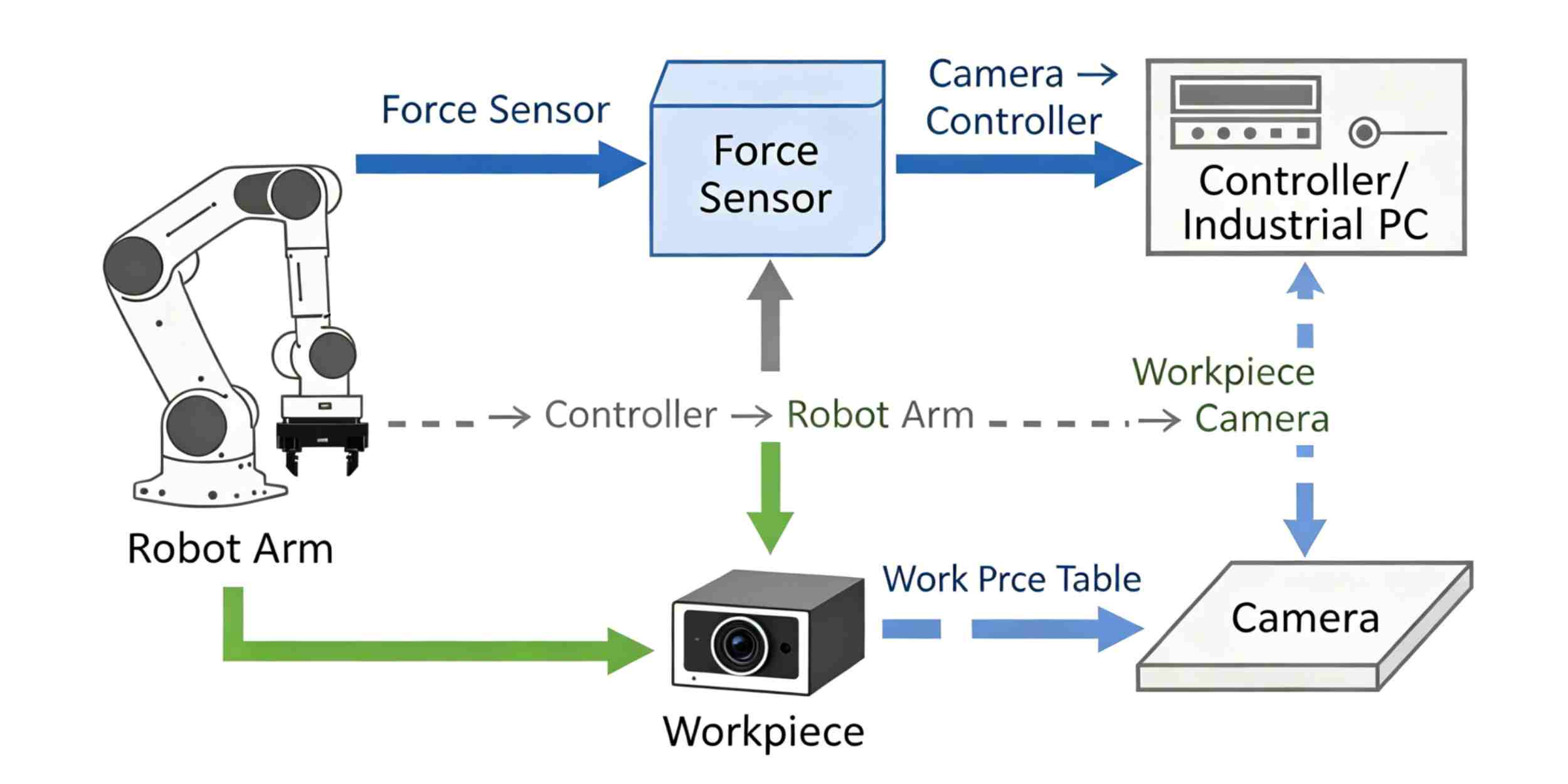
Industrial robot calibration is to maintain the stable performance of multiple industry workstations during operation and use. Calibration can prevent mechanical wear and sensor degradation from prolonged use in different environments. This paper proposes an adaptive self-recalibration reinforcement learning framework as a solution to the current problem. This paper studies a Markov Decision Process (MDP) for modeling the robot calibration process, including kinematic parameter identification and online error compensation. Customize the deep actor-critic structure to meet the continuous and high-dimensional requirements of industrial robot control problems. By using digital twins, experimental validation was conducted on different types of robotic arm systems, which were subjected to various simulated disturbances typical of real factory environments. The results indicate that the proposed technology can achieve high-precision low-level (sub-millimeter) positioning and converge more quickly than model-based methods. Able to adapt to various types of robots and quickly recover in the presence of interference. Based on the analysis of the current research results mentioned above, these findings involve the use of reinforcement learning techniques in the lifelong calibration of industrial robot positions.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Franciszek Krawczyk

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





