Real-Time Object Detection Deployment of YOLOv7-Tiny for Onboard UAV Applications
DOI:
https://doi.org/10.64972/jaat.2026v4.133p18e:234-248Keywords:
YOLOv7-Tiny, UAV, Real-Time Detection, Model Optimization, Embedded SystemsAbstract
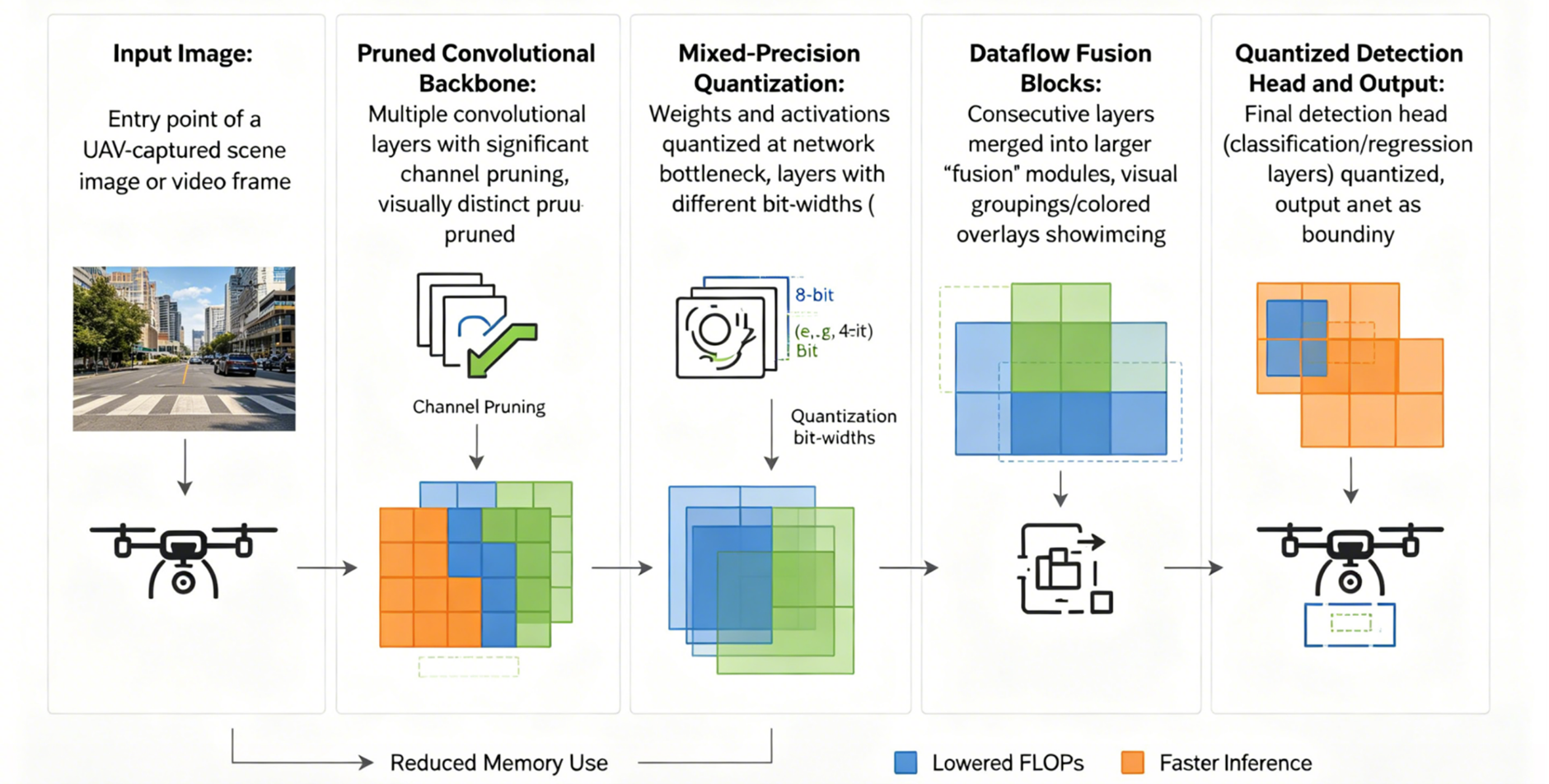
New intelligent and more reliable perception systems for autonomous unmanned aerial vehicles (UAVs) are being developed by computer vision technology for embedded systems in aerospace. This project will use an optimized YOLOv7-Tiny network on board a UAV to accomplish real-time detection while taking into account its computational and power limitations. Multi-objective channel pruning, sensitivity-aware mixed-precision quantization, and high-performance dataflow fusion for the model structure have all been studied concurrently to address the engineering challenges in small-scale model development. Numerous experiments have been carried out on a custom UAV testbed that is outfitted with an NVIDIA Jetson Xavier NX and a high-definition imaging system. The testbed has been placed in a variety of locations, including urban regions, agricultural zones, and low-visibility settings. The optimized model outperforms the unmodified YOLOv7-Tiny and other lightweight baselines, according to the results, with a mean Average Precision of 73.5% at 0.5 IoU. Jetson Xavier NX has an average inference speed of 41 frames per second and uses 32.5% less energy than the regular design. After network compression, ablation and robustness testing reveal that the detection accuracy remains over 94% in over 90% of real-world use situations. For real-time object detection on edge UAVs, the current work suggests a high-reliability and high-integrity deployment pipeline and confirms that it can satisfy the requirements of different missions in terms of model efficiency and detection accuracy.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Giorgos Katsaros, Georgios Papadopoulos, Katerina Papageorgiou, Dimitris Nikolaidis

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





