Parallax-Aware Urban Road Scene Segmentation Based on DeepLabv3+
DOI:
https://doi.org/10.64972/jaat.2026v4.109Keywords:
Urban Computing, Semantic Segmentation, Urban Scene Understanding, Parallax Correction, DeepLabv3+, Intelligent TransportationAbstract
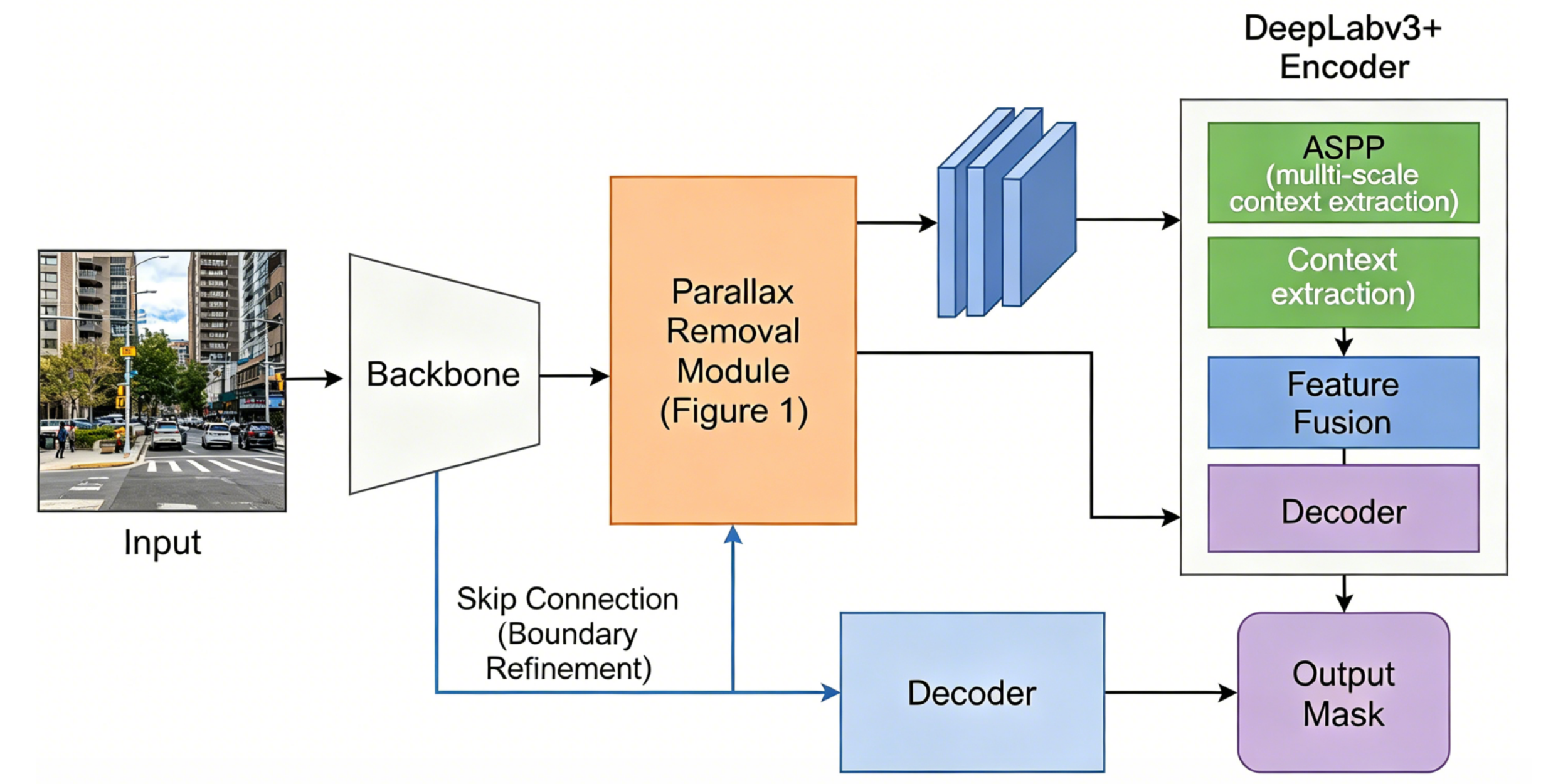
In order to promote the development of intelligent transportation and autonomous driving systems, clear semantic segmentation is essential. Due to depth discontinuities and parallax artifacts from dynamic viewpoints, as well as spatial misalignment and segmentation errors, accurately analyzing complex urban scenes is very challenging. This paper proposes a complete urban road segmentation framework. By introducing a separate disparity removal module in DeepLabv3+, the issue of disparity effects is clearly addressed. Model and correct the geometric distortions caused by depth, and then perform multi-scale semantic feature fusion for detailed scene analysis. All standard public datasets contain different levels of annotation details, including various urban areas and environments. According to the experimental results, the proposed method significantly improves the mean Intersection over Union (IoU) and boundary accuracy under conditions of strong perspective distortion, occlusion, and multi-layer structures. These conditions are contrary to the current baseline model. The architecture is very reliable under various weather conditions and urban environments, and it can run in real-time on embedded systems. Some improvements have been made, but there are still issues under extremely low visibility conditions. In the future, by integrating multimodal sensors and enhancing data augmentation, it is expected to provide more solutions. This study proposes a disparity-aware segmentation method for urban road scenes, directly supporting smart mobility and smart infrastructure.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Izabela Rutkowski

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





