Real-Time Semantic Segmentation for Autonomous Driving Based on Swin Transformer
DOI:
https://doi.org/10.64972/jaat.2026v4.107Keywords:
Deep Learning, Real-Time Semantic Segmentation, Swin Transformer, Autonomous Driving, Model Compression, Edge ComputingAbstract
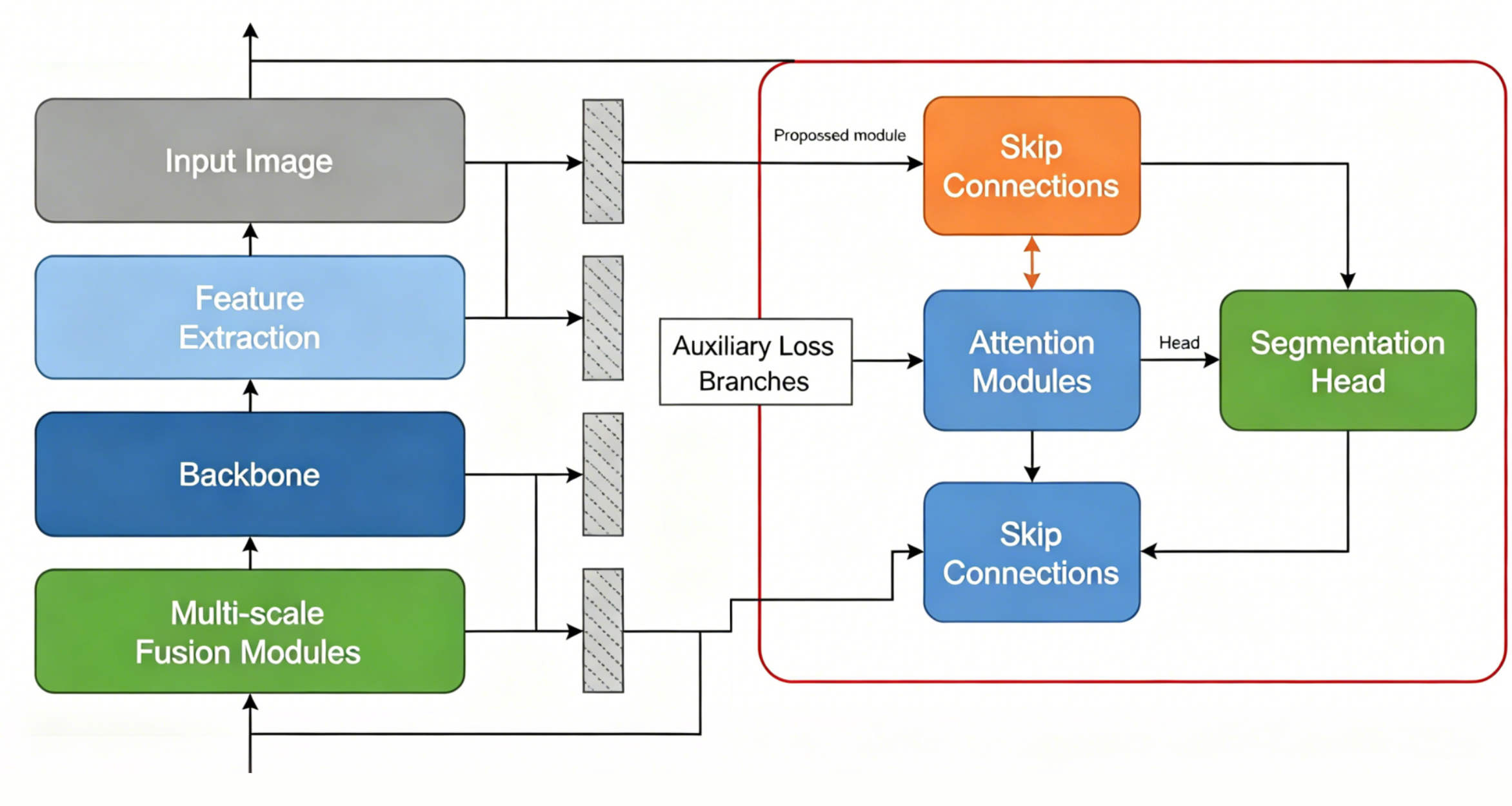
Real-time semantic segmentation helps safely construct detailed maps of dynamic cities and improves the robustness of autonomous driving perception. To meet the high precision and high efficiency requirements of automotive hardware, a universal Swin Transformer framework has been developed for autonomous driving. This new method is optimized at runtime by using small decoder modules, hierarchical window self-attention mechanisms, quantization-aware training, channel pruning, and adaptive normalization. By using these additions, global and local contextual data can be obtained at a relatively low computational cost. A large number of experiments were conducted on the built-in city driving dataset, aiming to improve its generalization ability under various lighting and weather conditions, and to enhance its capability to recognize fine-grained object boundaries and rare semantic categories. The system will run stably at a frame rate of over 30 FPS and can operate on both GPUs and embedded devices. Comprehensive performance evaluations indicate that it outperforms traditional CNNs and transformer-based baselines, with significant improvements in mean Intersection over Union (IoU) and boundary delineation. As shown above, scalable attention, controllable model compression, and system-level acceleration constitute the practical application of this framework in safety-critical environments. According to the above research, advanced vision transformers can be used for efficient and high-performance semantic segmentation in intelligent vehicles.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Sophia Koch, Jakob Bauer, Jonas Fischer

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.





