Cooperative Multi-Agent System Research for Driving in Mixed Traffic Environments
DOI:
https://doi.org/10.64972/dea.2025.v4i4.2291d:1-16Keywords:
Multi-Agent Systems, Deep Reinforcement Learning, Cooperative Driving, V2X Communication, Urban TrafficAbstract
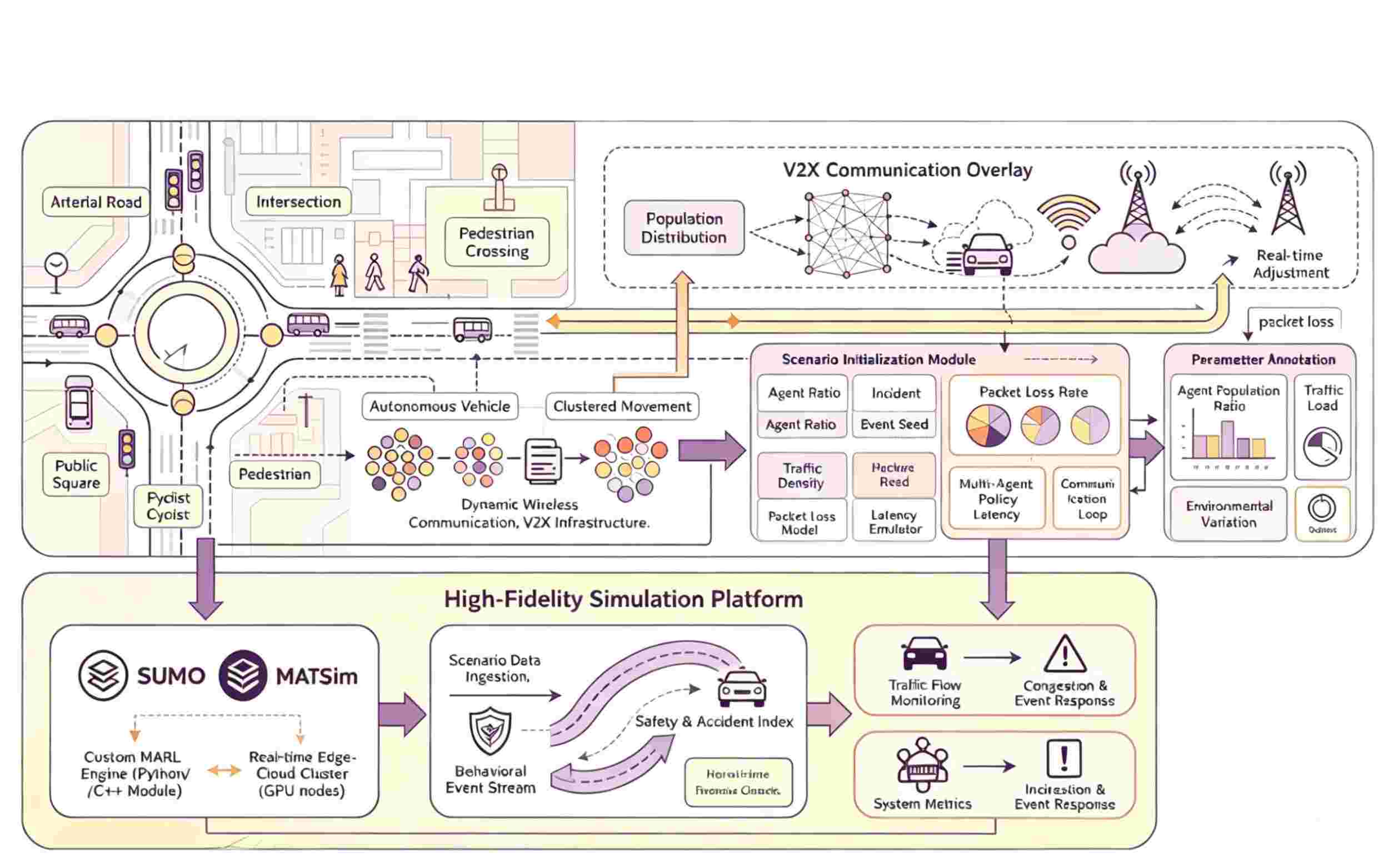
In the realm of mixed-use urban areas, cooperative multi-agent systems are growing quickly, and robust and scalable solutions for intelligent transportation systems are also being put forth. In this research, we develop a robust multi-agent system that integrates real-time vehicle-to-everything (V2X) communication with deep reinforcement learning. The many participant groups—self-driving automobiles, human-driven cars, vulnerable road users, etc.—as well as their diverse interaction patterns and urban networks are clearly described in the proposed system. For the extensive simulation experiment, a variety of traffic densities and agent compositions were chosen at random. According to the aforementioned experiments, the cooperative algorithm boosted the normalized vehicular flow rate by 17% and decreased collision rates by up to 40% when compared to the previous method. Both the decrease in traffic and the enhancement of cooperative driving performance are comparatively good when the percentage of intelligent agents approaches 60%. Additionally, ablation studies have shown that attention-based information fusion and distributed policy optimization are necessary to preserve efficiency and safety in the presence of inadequate communication. This work has demonstrated that cooperative driving agents can enhance traffic safety and operational efficiency in intricate mixed-traffic scenarios, hence offering an application basis for metropolitan regions.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Mariusz Jaworski, Ryszard Halik, Cyprian Górski

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.




