Edge AI-Driven Optimization for Multi-Sensor Data Processing in Intelligent Vehicles
DOI:
https://doi.org/10.64972/dea.2025.v4i2.1972d:14-29Keywords:
Edge Computing, Multi-Sensor Fusion, Autonomous Vehicles, Real-Time PerceptionAbstract
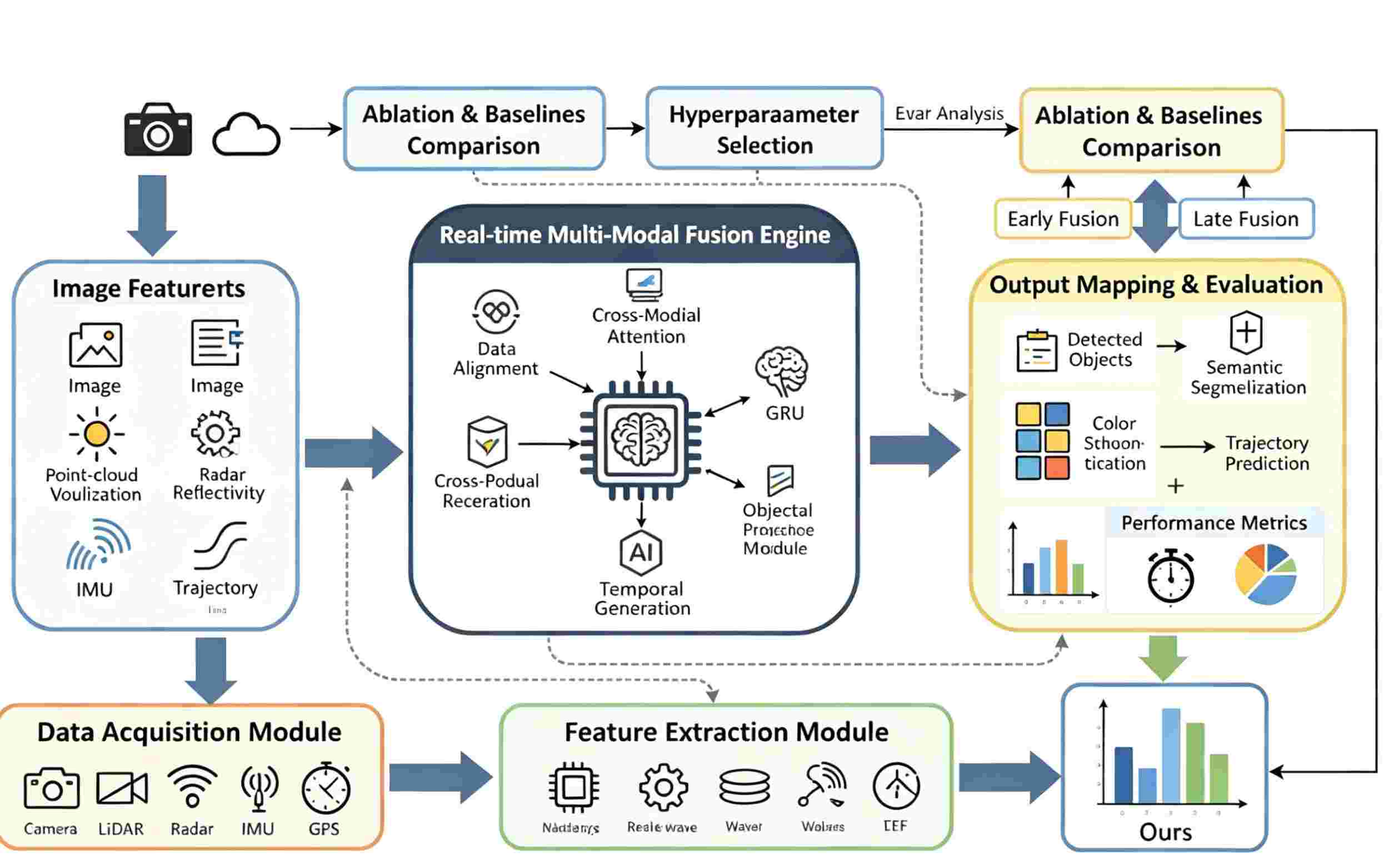
Many advanced edge-AI technologies have emerged with the development of intelligent vehicle systems, but the quantity and speed at which multi-sensor data must be handled have also increased significantly. A hierarchical fusion architecture for integrating data from cameras, LiDAR, radar, and inertial sensors under resource awareness and delay correction is presented in this research. The suggested solution uses dynamic workload distribution, lightweight neural networks, and synchronous hardware to enable high-efficiency perception on embedded vehicle platforms. A framework with an average precision of 78.2% for object detection has been developed based on the results of over 140,000 multi-modal annotated frames from urban and challenging environments; at the same time, the average inference latency has been maintained at 38.7ms per frame and the overall power consumption at roughly 23.4W. Additionally, the method can function in bad weather or when a sensor fails, and it is reasonably resistant to false positives. The capacity to generalise is further confirmed by cross-domain deployment; on public datasets, the detection mAP and trajectory RMSE are 74.9% and 0.85m, respectively, without fine-tuning. Based on the aforementioned findings, we think that improving the dependability and environmental adaptability of intelligent cars will need developing high-throughput, real-time, and scalable fusion systems at the edge.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2025 Roman Urban Turek, Sebastian Wiktor Walewski, Zenon Ziemba

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.




